Tomto
-
Numero contenuti
3.664 -
Iscritto
-
Ultima visita
-
Giorni Vinti
57
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Tutti i contenuti di Tomto
-
Durante la retrazione
Tomto ha risposto a Killrob nella discussione Problemi generici o di qualità di stampa
infatti mi sa che è partito anche il fitting in senso orario indurisci -
Scalatura di un oggetto 3D
Tomto ha risposto a Greg nella discussione Software di slicing, firmware e GCode
quasi tutti i cad permettono di scalare un oggetto anche fusion guarda questo tutorial ...puoi impostare direttamente la scala che desideri -
Durante la retrazione
Tomto ha risposto a Killrob nella discussione Problemi generici o di qualità di stampa
la molla sembra lenta prova a stringere la vite ..succede lo stesso con i cloni bmg o titan in quel caso però cliccano anche se non è il tac tac degli mk -
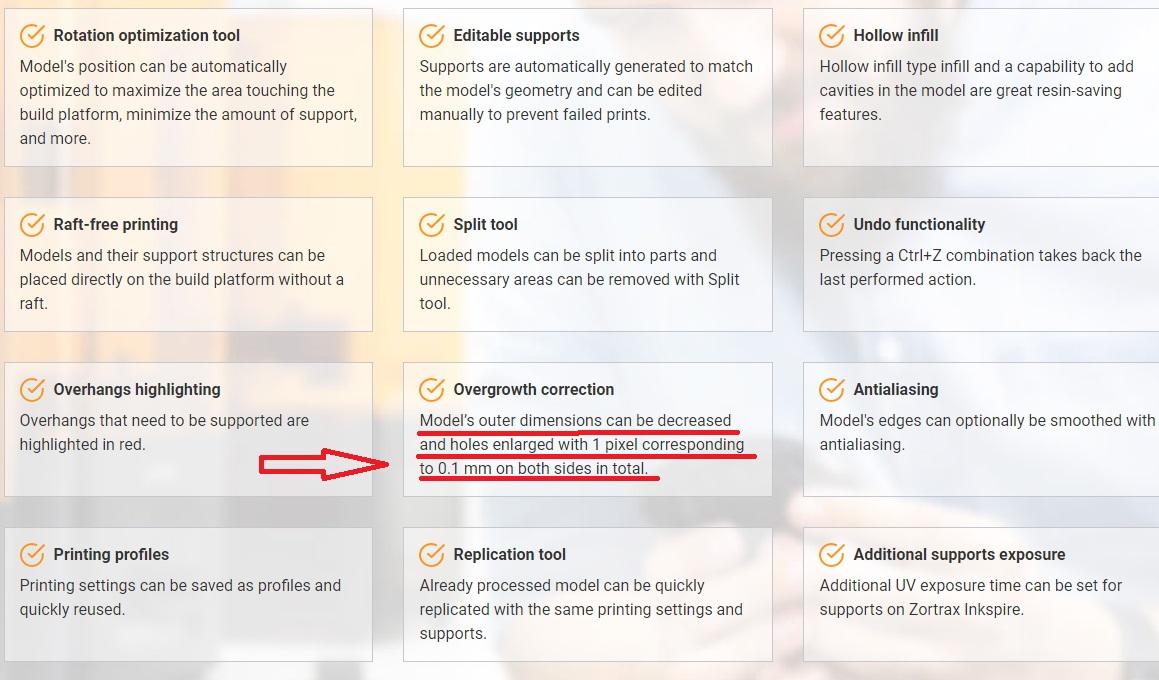
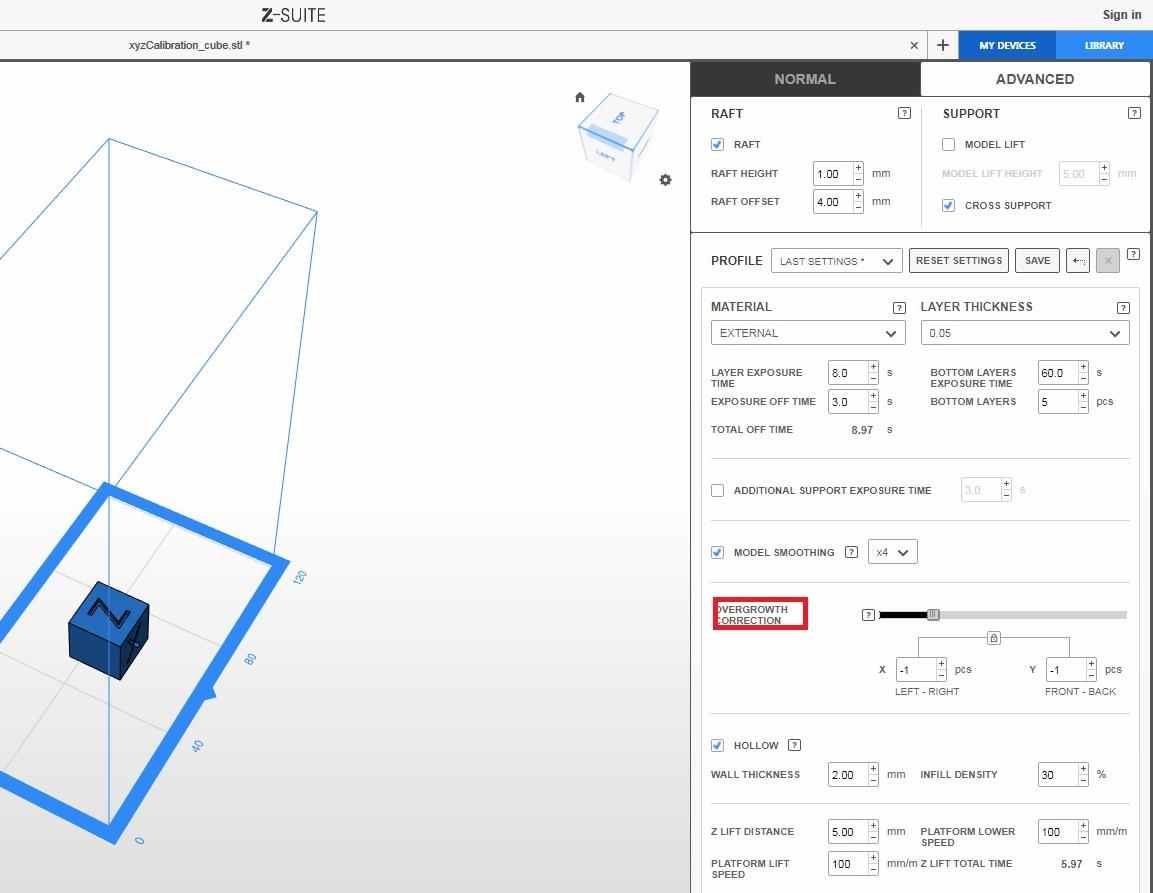
per le msla Inkspire Zortrax (msla) utilizza un'altro metodo . Decrementa i pixel nei perimetri interni esterni. Sembra che il vetro dell' lcd faccia da "lente" ingrandisce l'immagine ,restringimento o no il problema per le msla è a monte .Poi ovviamente il discorso della temperatura costante e post produzione incideranno di sicuro .... Questa funzione viene richiesta anche nei desiderata di chitubox. --------------------------------------------------------------------------------------------------------------------------------------------------------------------- Lo slicer di zortrax genera file photon (primo modello). Ho aggiornato il mio firmware adesso legge differenti formati. Il guaio è che ora la stampante è in grado di leggere i file affettati con lo z-suite , ma non c'e possibilità di intevenire sulla velocità di z.Anche se cambio i valori la stampante non li considera e si muove troppo velocemente rispetto a prima (circa 2 secondi contro i 6 secondi precedenti)...ho paura che questo comprometta la stampa ....aspetterò che mettano questa funzione in chitubox ....nel frattempo compenso con il cad (cheppalle però) ----------------------------------------------------------------------------------------------------------------------------------------------------- Edit. ho scoperto che posso correggere le velocità da menù LCD .Proverò ad usare lo slicer di Zortrax Z suite

-
A me sembra un discorso sensato. Mini su cartesiana ok Big su core xy ok P.S hypercube è una core xy
-
io ho i 2130 sugli assi in spi ,con questo protocollo da pronterface ( tipo repetierhost )puoi vedere lo stato dei driver (se è rotto o ha problemi ....utile in caso di guasti), regolare la v ref e i sensorless homing (ti permette di non usare gli endstop su xy , per z se è doppio non funziona bene...) ho un 2208 all 'estrusore in standalone (senza uart) perchè il 2130 in spi mi dava problemi poichè ho un motore da 1.5A i 2209 si collegano in uart con la scheda e sono adatti a motori fino a 2A (gli altri tmc 2208/2130 fino a 1.4A) hanno le stesse funzionalità dei 2130 ma permettono di pilotare meglio motori più potenti (e funzionano meglio con estrusori con riduzione) e le altre funzioni già presenti sui 2208 / 2130 sono migliorate... Sono muti come tutta la serie tmc .non hai effetto pelle di salmone e moire sulle stampe (vengono meglio in generale) per farla breve i 2209 sono più potenti e aggiornati ....uart e spi sono due protocolli diversi ma in questo caso "fanno le stesse cose" puoi usare Atom o visual studio caricandoci PlatforMio ci sono un sacco di tutorial su you tube. Poi se hai problemi basta che fai un fischio 😃 e ti diamo una mano lo supporta .....l'unica cosa e che i driver tmc puoi metterli solo in standalone (senza uart/spi) a meno che tu non voglia aggiungere fili e fare saldature. P:S con skr 1.3 ci sono driver tmc (sempre della biqu) predisposti per l'uart o spi , Non hai bisogno di fare saldature e aggiungere cavi li metti e basta al massimo togli qualche jumper non so se sono stato molto elementary😃 ma non so in che altro modo spiegarmi alla fine sono poche operazioni semplici
-
Chitubox discrepanza tempi di stampa
Tomto ha risposto a Formatgio nella discussione Software di slicing, firmware e GCode
giusto. ma speriamo che l'aggiornamento di chitubox arrivi presto ! (loro hanno detto questo mese e che la versione pro è ancora in fase di test )! almeno ci risparmiamo i calcoli😃 -
Chitubox discrepanza tempi di stampa
Tomto ha risposto a Formatgio nella discussione Software di slicing, firmware e GCode
E la distanza è di 6 mm . in totale son circa 6.5 secondi effettivi -
Chitubox discrepanza tempi di stampa
Tomto ha risposto a Formatgio nella discussione Software di slicing, firmware e GCode
Per la photon /photon s il tempo per z è di 6.5 secondi. Chitubox per la photon non s permette di variare il tempo. Per la photon s sarà possibile con la nuova release dello slicer .per il momento il tempo di spostamento di z non viene considerato da chitubox Le accelerazioni di z bisogna utilizzarle con cautela in particolare sotto i 50 micron -
😂😂😂
-
dalla cina costano moooolto meno 4 2209 pronto per l'uart 18.42 euro.Se @jagger75 ha urgenza può optare per qualcosa di economico come i classici A4988 ....
-
Chitubox discrepanza tempi di stampa
Tomto ha risposto a Formatgio nella discussione Software di slicing, firmware e GCode
Questo avviene con tutti gli slicer . IN più il tempo di stampa dell'lcd è solo indicativo . Gli altri utenti potranno confermarlo -
L'ide di arduino non si usa più devi usare Atom (o altro) e PlatforMio . Ma è semplice L'lcd penso non ci siano problemi @invernomuto forse ne usa uno non ricordo. Il classico reprap funziona
-
Domanda generica
Tomto ha risposto a Killrob nella discussione Problemi generici o di qualità di stampa
mmh forse temperatura nozzle?....ma ancora di più la velocità di stampa primo layer....prova 20mm/s ventola a 0 -
si ma visto che i prezzi di una 32 sono uguali a quelli di una 8 tanto vale prendere una 32bit già questo basta . I vantaggi non sono tanti ma ad esempi sulle ripartenza una 8 bit fa delle micropause la 32 no . Ma cominci a notarlo a 60mm/s minimo. i driver puoi sceglerere quelli che vuoi . Se li preferisci silenziosi puoi prendere i 2209 questa è una mini (z lo puoi sdoppiare con adattatore o metodo più casareccio, se non sbaglio non hai un doppio z pilotato da due driver distinti e doppio endstop) questa invece è la mia
-
si può provare . ma se già è partita una porta....sentiamo cosa ne pensano gli altri adesso le 32bit te le tirano dietro . Potresti prendere una scheda come la mia 16 euro dalla cina e 25 su amazon.....
-
Allora forse è saltata la porta E e ha rovinato anche i driver ... Intendevo cambiato . Peche di solito in nema hanno lo standard solo per l'attacco .Per i cablaggi no. Di solito quando i motori fanno quel lavoro è perche i due cavi centrali sono essere invertiti (questo dipende dai produttori) . A me è successo quando ho sostituito il mototre di E con uno della e3d ,e horisolto invertendo i cavi centrali . Ma non è il tuo caso visto che motori e scheda sono gli stessi P.S la stampante è venuta bene😃
-
non è che per caso hai cambiato motori?
-
mettici il driver di y e vedi se funziona. se si allora è partito il driver . in caso contrario è partito E1 se E2 era libero devi intervenire su marlin . posta il config h prova anche a scambiare anche l'endstop di x forse è "in tilt"
-
Ugelli differenti: impostazioni
Tomto ha risposto a Mattia Soppelsa nella discussione Software di slicing, firmware e GCode
può essere la ruota godronata da fissare meglio. Se guardi bene è fermata da un grano m3 dovresti stringerlo. intanto prova cosi ...poi facci sapere -
Riscaldare camera di stampa.
Tomto ha risposto a Formatgio nella discussione La mia prima stampante 3D
Avevo pensato anche io a questa cosa. In rete ho trovato questo Ma sinceramente non la vedo una buona soluzione . la ventola all'intero in caso di guasto sono dolori bisogna essere sicuri che le componenti siano di qualità se la temperatura interna supera i 60 l'lcd si guasta (riportato nel tread sla/dlp) Per l' odore prova a togliere le due ventole da 30mm come ti dicevo è un operazione semplice. -
sono d'accoro anch'io infatti nel tuo tread (LINK) ho commentato in maniera ironica......considerando smog, fumo. (non sò se ricordi) sulla resina avevo detto "penso puzza quindi è tossica" ma poi si è scoperto che la puzza di per sè non è indice di tossicità😃 Essendo invece molto più tossico l'alcool ho pensato che una resina lavabile in acqua o sapone fosse un vantaggio. Nel mio caso però vedo che almeno per la resina bio che sto provando ha caratteristiche che non eguagliano quella in dotazione. Preferirei che ci fossero "alcool" non tossici. ..... ma questo è un mio parere personale ....mettiamoci pure che di resina uv ancora ne so ben poco
-
Giusto Mea culpa mi era sfuggito il "per particelle"
-
Il link é in un tread di @Davide87 lui ricorderà dov' é. Il produttore non da indicazioni..... Suppongo valga il discorso della resina classica. L' unico vantaggio di questa resina sembra essere solo il lavaggio con detersivo. (parlo per quella di anycubic per esun non so) 😀 A livello di stampa non mi convince ancora.... Ma ripeto con la stampa a resina sono alle prime armi posso solo paragonarla a quella verde in dotazione con la stampante. Grazie per l' intervento 😀
-
può essere...comunque l'i3 ha 3 connettori sulla destra del basamento può che non siano ben attaccati