Salvogi
-
Numero contenuti
1.424 -
Iscritto
-
Ultima visita
-
Giorni Vinti
26
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Tutti i contenuti di Salvogi
-
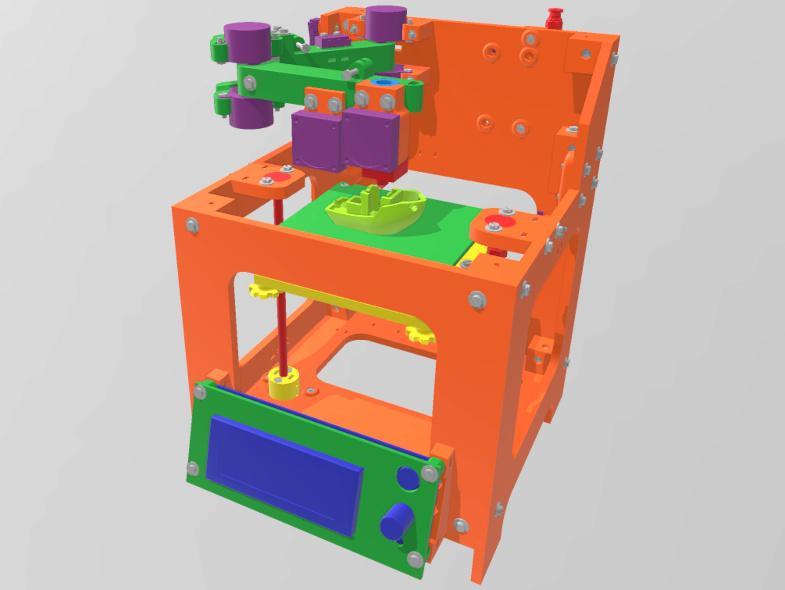
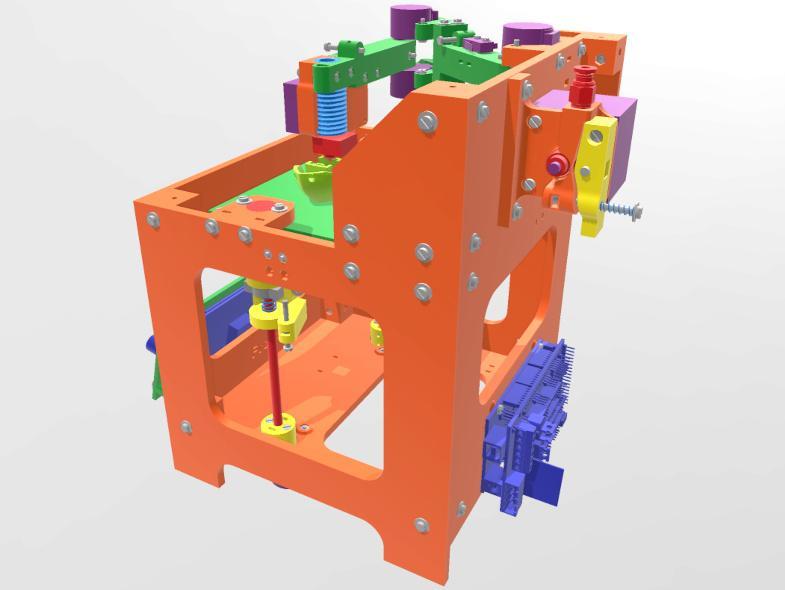
Ho fatto in ordine i seguenti tentativi. Ho scaricato Marlin 2.0.9.1 con i files di configurazione di esempio per le stampanti scara. La stampante non si muoveva ed appena provavo a fare l'homing si riavviava. Se inviavo il comando G28 X tramite host la stampante mi dava dei numeri di angoli teta spropositati e non si muoveva lo stesso nulla. Ho visto che il file Marlin\src\module\scara.cpp è pieno di funzioni trigonometriche che sicuramente mettono in crisi la scheda a 8bit. Ho provato con Marlin 1.1.9.1 ed il risultato è stato lo stesso. Ho trovato su Internet una versione di Marlin 1.0 però non compilava con Arduino IDE 1.8.15 ed ho dovuto scaricare Arduino IDE 1.0.6, si muoveva anche se non ho capito in che direzione ed il display non funzionava. Ho provato a scaricare Marlin 1.0 ma non sono riuscito a configurarlo come SCARA. Su Thingiverse ho trovato il progetto MP SCARA dove c'erà un file in Python per convertire le cordinate da lineare ad angolari. Siccome la mia cinematica è diversa, l'ho dovuto riadattare un po'. A questo punto penso che le stampanti SCARA richiedano obbligatoriamente una scheda a 32 bit, purtroppo la filosofia di questa stampante è il minor costo possibile. Alla fine quello del convertitore in Python è la soluzione più semplice è sembra anche comoda, i valori visualizzati sul display sono gli angoli di rotazione in gradi, virtualmente ho un piatto 97x136 gradi che corrisponde al piatto reale 110x110mm. Invece degli step/mm, ho gli step/grado pari a 90.573 sep/grado. Questo è il gcode prodotto dallo slicer e questo è quello elaborato dal script in Python Per una stampante SCARA "seria", occorrono motori Nema 17 e riduttori. La mia è la versione per tirch🤐 ehm volevo dire facile da costruire. In pratica ha i seguenti compromessi. Utilizzo degli economici 28byj-48 che hanno 2037 step/giro contro i 200 step/giro dei Nema 17 questo consente anche di evitare riduttori a cinghie o ingranaggi fintanto che si realizzano stampanti con dimensioni massime del piatto di 110x110mm. Il fatto di non avere riduttori permette di avere una cinematica per gli assi X ed Y priva di cuscinetti e/o guide lineari con ulteriore risparmio. Sull'asse Z ho lasciato solo le barre filettate anche se ciò potrebe causare un piatto un po' traballante. La struttura stampata 3D per evitare acquisti di materiali vari. La scheda a 8bit non adatta a stampanti SCARA ma utilizzabile con il convertitore in Python.

-
Su alcune cose penso che ci vado fortunato, non pensavo di riuscire a fare funzionare questo aggeggio. A questo punto penso di poterci cavare delle stampe anche se bisogna vedere con quale qualità.
-
Noooo, già per fare questo test ho consumato un evidenziatore 🤣
-
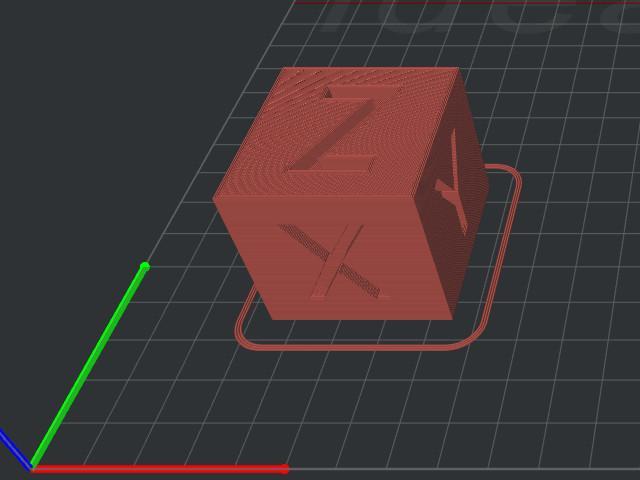
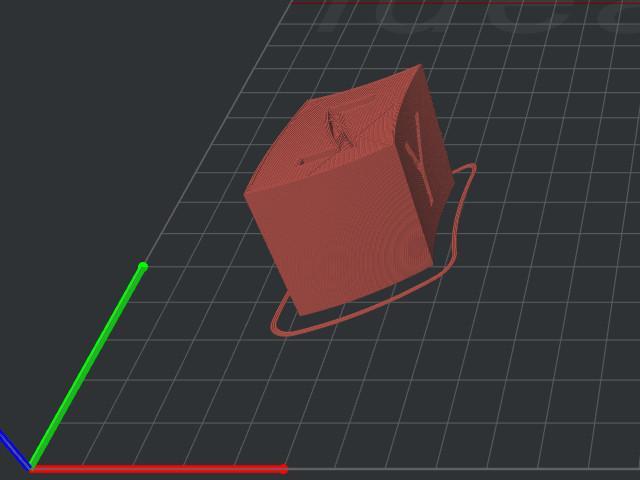
Il firmware è stato un po' più complesso del previsto. Alla fine ha vinto Marlin quindi non sono riuscito a caricare un firmware adatto a SCARA printer ed ho dovuto caricare un firmware per stampanti cartesiane. E' possibile utilizzare il firmware per stampanti cartesiane sulle stampanti SCARA grazie ad un programma di conversione in Python che converte le coordinate dei file gcode. Ho provato a stampare un cubo 40x40x40mm, ancora devo calibrare gli assi per cui è venuto un po' storto.
-
Di muoversi si muove, lentamente ma si muove, ha anche abbastanza forza. Dovrei mettere degli elastici un po' più forti. Ho fatto il test con uno sketch di prova. Il problema è ora configurare Marlin.
-
Piano rialzato per taglio laser in Faesite e chiodi
Salvogi ha risposto a eaman nella discussione Incisione e taglio laser
Complimenti per l'idea ma soprattutto per la pazienza. Anche se la faesite dovrebbe essere non attaccabile, non potresti spruzzarci della vernice chiara? Così quando si rovina puoi rinnovare solo lo strato di vernice? Ho detto una cosa a caso, non so se può andare, non ho esperienza con i laser. Sarà uno per prendere la mira e l'altro per piantarlo 😂 -
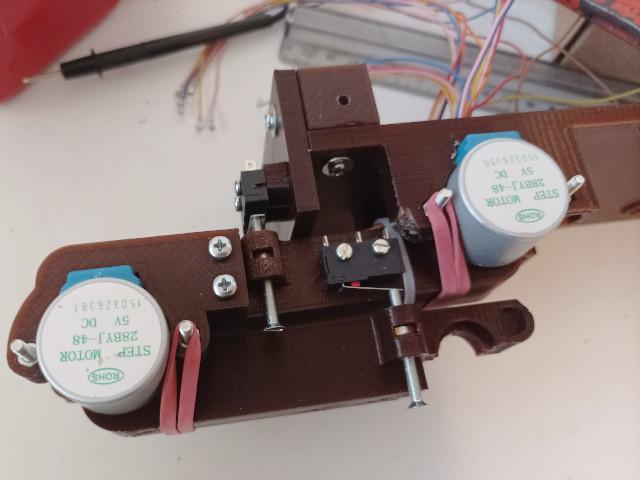
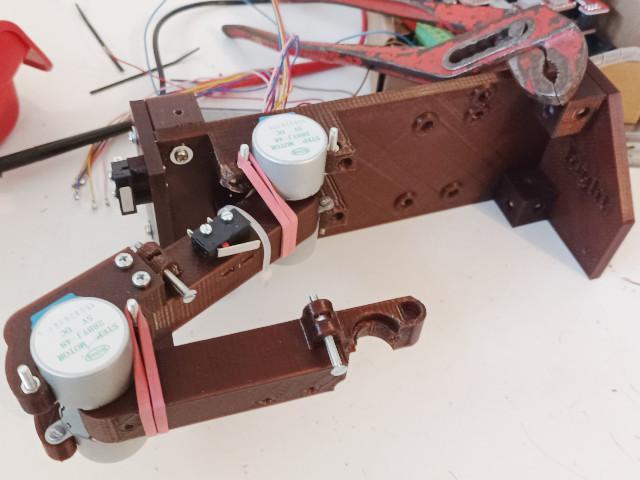
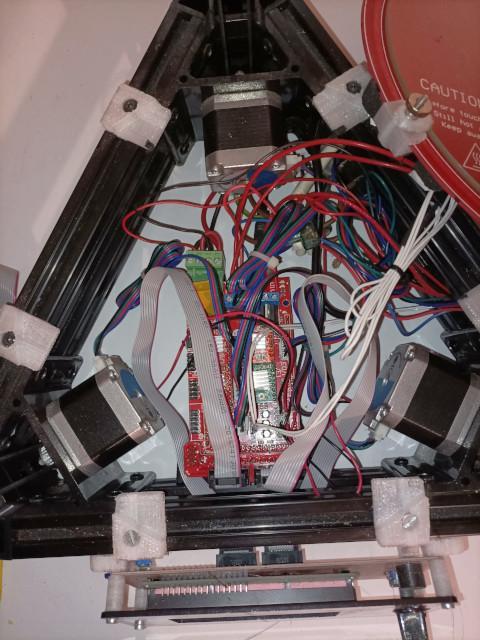
Ho saldato i cavi degli endstop ed ho fissato il braccio su uno scatolo per poter fare dei test. Ora lo collego alla scheda RAMPS e vedo che succede.
-
Ho trovato una possibile soluzione. Oggi provo i collegamenti elettrici e vedo se questa soluzione può andare.
-
Per il foro ho fatto delle stampe prova ed è calibrato per innestarsi senza gioco. Per installare gli stepper ci è voluto un po' di forza perché la parte stampata stringe sulle parti piatte dell'alberino. Purtroppo il gioco proviene tutto dagli stepper che avranno un riduttore ad ingranaggi di scarsa fattura.
-
Mi sa che il progetto rischia di fallire per colpa degli stepper 28byj-48 che hanno troppo gioco, almeno quelli in mio possesso. Sebbene abbiano un angolo di passo di appena 0,18° hanno un backlash di 5° circa. A causa del gioco è possibile spostare l'hotend da 12mm. Se non trovo una soluzione, posso considerare il progetto terminato.
-
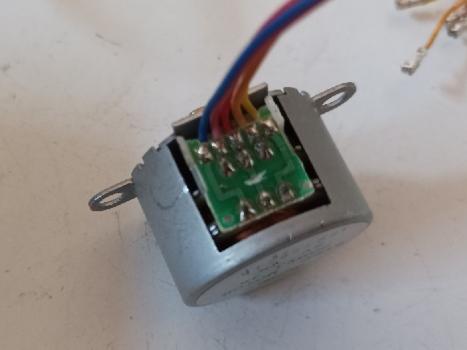
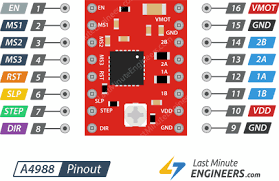
Ho provato a modificare lo stepper tagliando la pista del PCB che collega i 2 avvolgimenti ed a collegarlo ad un driver A4988, sembra che in questa configurazione la coppia sia maggiore e si riesce a farlo ruotare più velocemente. I miei 28byj-48 sono da 5V. Inizialmente avevo messo la Vref del driver 0,15V, poi l'ho ridotta a 0,07V tanto sembra che lo stepper funzioni allo stesso modo anche con la corrente più bassa.
-
Anche io non sono molto ottimista, comunque sono utilizzati anche nella ToyRep e la EasyThreed X1 utilizza modelli simili. Il problema che nella mia scara è richiesta una coppia maggiore, speriamo bene. Comunque occorre modificarli da bipolari a unipolari con lo stesso procedimento spiegato nella documentazione della ToyRep, con questa modifica è possibile collegarli direttamente agli A4988 e si ottiene un po' più di coppia. Più passi ci sono più coppia si ha ma più lento gira il motore. Questo è quello che voglio capire che succede facendoli lavorare in coppia, anche io penso che ci potrebbero essere dei problemi. Esagerato come al solito, mi metti in imbarazzo soprattutto se il progetto non funzionerà. Comunque, come consigliato da @eaman ho iniziato a stampare la parte del braccio ed ho quasi completato tutti i pezzi. Se vedo che può andare realizzo un supporto per il braccio e un attacco per un penna da mettere al posto dell'hotend per fare delle prove.
-
Probabilmente ghosting non ne avrò perchè non riuscirò a farla funzionare 🤨 Mi hai convinto, sto iniziando a stampare solo la parte del braccio.
-
Aiuto per la costruzione di una stampante con cinematica H
Salvogi ha risposto a l0v3byte nella discussione Nuove idee e progetti
Presumo che come cinematiica ad H intendi una stampante in cui il nozzle si muove lungo gli assi X ed Y ed il piatto lungo l'asse Z e non la cinematica H-bot, giusto? Dipende da quanto vuoi spendere e che necessità hai (numero di estrusori e tipologia di sensori di temperatura), io andrei in ogni caso su una scheda a 32bit. Secondo me, puoi valutare le seguenti schede. BTT SKR V2.0 massimo 2 estrusori MKS SGen_L V1.0 (occhio a prendere quella a 32 bit), simile alla SKR ma costa molto meno io ce l'ho nella stampante delta BTT Octopus V1.1 molti estrusori BTT GTR V1.0 molti estrusori e termocoppia Se compri su su AliExpress la differenza di prezzo tra SKR 2.0, GTR 1.0 e Octopus 1.1 sono pochi euro quindi io andrei direttamente sulla GTR 1.0 altrimenti piglierei la MKS SGen_L per risparmiare. Per quanto riguarda il display io ho un LCD 2004 ed un LCD 12864, effettivamente con un solo hotend la differenza è veramente minima. L'LCD 12864 in più mostra solo la velocità della ventola che soffia sulla stampa. Per un piatto 220x220 andrei con 2 motori per l'asse Z mentre per gli assi X ed Y utilizzeri complessivamente 2 motori con la cinematica CoreXY. Io andrei con i profili 2020. Dipende molto dal progetto, se sai utilizzare un programma di modellazione 3D, puoi farti un disegno, altrimenti puoi partire da un progetto che trovi su Thingiverse e da li ricavare le lunghezze dei profili -
Ho fatto il disegno di una bozza di una mini stampante Scara https://www.thingiverse.com/thing:4935027 Ovviamente questa stampante è pensata solo per lo studio e la comprensione della movimentazione Scara quindi è senza nessuna pretesa, ad esempio l'asse Z utilizza le stesse barre filettate come guide lineari. Ho pensato di utilizzare gli stepper 28byj-48 perchè sono economici e perchè hanno 2037.886 passi/giro contro i 200 passi/giro dei Nema 17, in questo modo si evitano riduttori a ingranaggi o a cinghie. Per muovere i bracci ho pensato di mettere in parallelo 2 stepper per cercare di raddoppiare la coppia ma non so se gli stepper possono lavorare in coppia. Il disegno è pensato per essere stampato anche con stampanti con piatti da 220x220mm. Secondo voi potrebbe avere qualche possibilità di funzionamento un marchingegno simile?
-
Appurato che la tua scheda non ha i ponticelli, ho provato a cercare su internet della documentazione sulla GT2560 V4.0 ma non si trova nulla. Comunque problemi non ce ne dovrebbero essere perchè quasi sicuramente i microstepping dovrebbero essere settati a 16 con MS1, MS2 ed MS3 a livello alto, in questo caso anche con il TMC2208 dovresti ottenere 16 microstep. Hai detto che fa l'homing ma provando a muovere gli assi non si muovono? Se è così probabilmente basta regolare solo la corrente. Inizialmente imposta una Vref da 0,75V che corrisponde ad una corrente di 0,5A circa, è bassa ma è per evitare di fare pasticci, poi se gli stepper hanno difficoltà a muoversi puoi puoi aumentare la Vref a poco a poco. La cosa migliore sarebbe prendere la sigla degli stepper e cercare su internet ma spesso non si trovano i dati di alcuni stepper.
-
Imperfezioni riempimento contorno fori
Salvogi ha risposto a Teius92 nella discussione Problemi generici o di qualità di stampa
Concordo con @muffo ed @eaman ed aggiungo che puoi anche provare ad aumentare leggermente il flusso dell'estrusore e a ricontrollare il livellamento del piatto. Comunque complimenti, normalmente è difficile ottenere scritte così ben definite con le stampanti FDM. -
Valuta bene la stampante delta con la quale andrai a fare il cambio, Photon mono e cure & wash 2.0 sono un bel po' di roba. Come possessore di una stampante delta ti posso suggerire quanto segue. Occhio alle guide lineari, le rotelle potrebbero anche andare bene se dotate di piastre in metallo, altrimenti molto meglio le guide MGN12 o al limite le barre tonde con i cuscinetti serie LMxxUU. Io avevo le pulegge con i supporti in plastica e durante il funzionamento si deformavano troppo in pratica poggiavono solo 2 delle 3 rotelle. Molte stampanti delta in commercio vengono vendute con le pulegge come quelle che avevo io. Valuta l'area di stampa, la movimentazione delta è adatta a stampanti di grandi dimensioni, purtroppo in commercio il volume di stampa più venduto è diametro 200mm per altezza 300mm che potrebbe anche andare bene ma questo lo devi decidere tu. Le stampanti delta richiedono un livellamento abbastanza frequente ed è un'operazione che richiede dai 10 ai 15 minuti con la stampante collegata ad un PC. Per evitare ciò sarebbe molto utile un sensore di livellamento. Nella mia stampante, lo stesso firmware sulla scheda a 8bit ogni tanto dava i numeri mentre sulla scheda a 32bit funziona senza nessun problema. Le stampanti delta richiedono l'esecuzione di più calcoli, le schede a 8bit vanno bene ma quelle a 32bit sono decisamente meglio. Considera anche che l'autocostruzione di una stampante delta è molto più semplice di una stampante Prusa o CoreXY. Comunque io ho una Elego Mars (versione 1 non Pro, in pratica quella più scarsa) comprata usata su eBay e non ci penso neanche a togliermela, la utilizzo poco rispetto alle stampanti FDM ma mi è stata utile per realizzare cose che con la stampante FDM non avrei potuto fare. Per adesso ho utilizzato solo resina lavabile in acqua, probabilmente sarà più scarsa come resistenza, ma mi sono evitato i problemi di lavaggio con alcool.
-
Aggiornamento MGN12H e altro su stampante delta
Salvogi ha risposto a Salvogi nella discussione La mia stampante 3D e il mio laboratorio
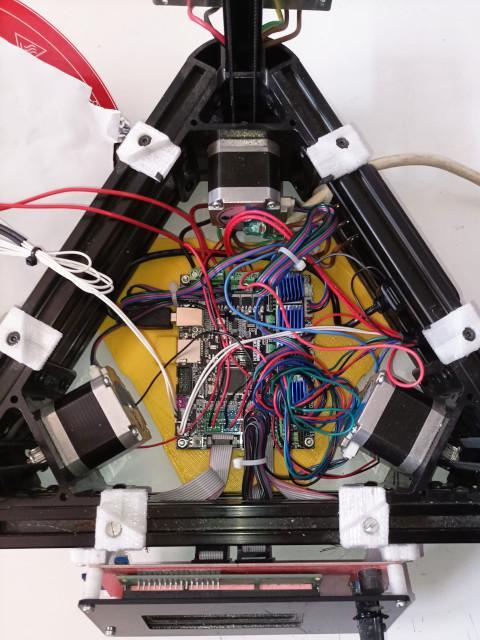
Quando non fa i capricci ha il suo fascino. Per me è comoda perchè occupa poco spazio ed è facilmente trasportabile, ora con i driver Trinamic risulta essere molto più silenziosa della CoreXY (che ha sempre i driver Trinamic) perchè le masse in movimento sono minori e non si sente il rumore tipo ticchettio ad ogni cambio di direzione. Comunque esistono stampanti con sistemi di movimentazione ancora più particolare, ad esempio le hangprinter. Questo è il risultato finale della stampa. Mannaggia al tizio che ha fatto il disegno che non ha previsto anche un portacoperchi per le pendrive.
-
Se hai gli A4988, i ponticelli in qualche posto dovrebbero essere almeno che non è previsto di modificare i microstep. Qual'è la tua scheda madre? Casomai puoi postare una foto della scheda madre magari con un driver tolto?
-
Aggiornamento MGN12H e altro su stampante delta
Salvogi ha risposto a Salvogi nella discussione La mia stampante 3D e il mio laboratorio
Attualmente sono alle prese con questo https://www.thingiverse.com/thing:2637487 Con i nuovi driver TMC2208 la stampante è molto silenziosa, è il mio telefono che registra con volume molto alto. -
Non per forza, li puoi utilizzare in modalità standard. Se non tocchi il firmware la scheda madre non comunica in modalità UART con i driver ed i microstep li regoli con i ponticelli mentre la corrente con la rotella come stai facendo con gli A4988. Tra l'altro se hai una scheda come la Geeetech GT2560, non puoi utilizzare i driver in modalità UART quindi in ogni caso non devi modificare nulla nel firmware. I driver A4988 hanno tre pin per i ponticelli MS1, MS2 ed MS3, sotto i driver probabilmente avrai installato tre ponticelli che significa 16 microstep. A questo punto devi regolare anche gli TMC2208 a 16 microstep, gli TMC2208 hanno solo due pin MS1 ed MS2 (perchè l'altro serve per la comunicazione UART) quindi dovrai mettere i ponticelli solo per MS1 ed MS2. Il ponticello di MS3 sarebbe meglio toglierlo perchè in alcuni TMC2208 è utilizzato per la comunicazione UART, se invece sul tuo driver in corrispondenza del pin MS3 c'è scritto NC è indifferente lo puoi anche lasciare. Poi dovresti regolare la corrente con la formula fornita da @FoNzY, però io mi limiterei ad 1A, nelle mie stampanti utilizzo correnti di 0.7-0.9A. Nel TMC2208 regolerei la Vref a 0,75V. Misurare la Vref è un'operazione rischiosa perchè se con il puntale tocchi due pin fai un cortocircuito con la morte del driver. Il tester va messo in VDC perchè se lo metti in misura di corrente fai un cortocircuito. Il puntale nero ti conviene collegarlo in un posto comodo, ad esempio sul negativo di alimentazione della scheda madre. Con il puntale rosso tocca la vite di regolazione della corrente e misuri la Vref.
-
"Piccolo" problema di qualità
Salvogi ha risposto a Ale93_ nella discussione La mia prima stampante 3D
Potrebbe essere un problema di intasamento del nozzle, mentre ti fa il problema senti un rumore tipo TAC-TAC proveniente dal motore che trascina il filamento? Per poter capire meglio il problema, specifica anche tipo di filamento, temperatura di stampa, velocità di stampa, altezza del layer, ecc. -
aggiungere un "foro" in un file .stl chi mi aiuta
Salvogi ha risposto a FoNzY nella discussione Problemi di modellazione 3D, gestione mesh, esportazione in stl
Dovresti creare dei cilindri, posizionarli nella direzione del foro ed eseguire la sottrazione dei solidi. Però, se parti da un stl ti conviene utilizzare Meshmixer, è gratuito, molto potente e facile da usare. Importi il file su Meshmixer, selezioni il modello cliccandoci sopra, clicchi sull'icona Meshmix, clicchi sul cilindro e lo trascini sulla scena, ridimensiona, ruota e posiziona il cilindro dove vuoi eseguire il foro, poi clicca su Accept. Seleziona il modello ed il cilindro (importante prima il modello e poi il cilindro, se fai il contrario sottrai il modello al cilindro) cliccandoci sopra tenendo premuto shift (per la selezione multipla), clicca su Boolean Difference. Alla fine clicca su esporta. Spero di non avere commesso errori, è da ieri sera che ho iniziato ad utilizzare Meshmixer. -
Aggiornamento MGN12H e altro su stampante delta
Salvogi ha risposto a Salvogi nella discussione La mia stampante 3D e il mio laboratorio
Nel frattempo mi sono arrivati la scheda MKS SGEN L V1.0 ed i driver TMC2208 UART.