Tomto
-
Numero contenuti
3.664 -
Iscritto
-
Ultima visita
-
Giorni Vinti
57
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Tutti i contenuti di Tomto
-
Si hai ragione il test è fatto a 1A senza dissipatori sono freddi ma non ho visto test a 3A .Comunque li ha fatti pure fysetech ma costano un fottio , li ho nominati per fare un esempio
-
in sostanza anche se hai una 8 bit a 1/16 può essere precisa lo stesso(una precisione "relativa " che con i fdm cinesi...) .Se passi ad una 32 con l'intento di avere più microstep e quindi più precisione secondo me fai una cazzata , i motori dovrebbero, in teoria andare a basse velocità in particolare sulle prusa che hanno il carrello pesante, una core xy potrebbe già andare più veloce , per via delle minori masse in movimento. I vantaggi che hai con una 32 bit sono altri . In linea di massima una 32 bit è meglio, male stampanti che ne traggono più giovamento sono le delta e le core xy Cito il magokimbra : Perché una delta si avvantaggia delle schede a 32 bit? Semplice, perché mentre per una cartesiana il comando spostati da X 0 a X 10 vuol dire spostarsi di 10 mm su quell'asse e l'unico calcolo che deve fare il processore è moltiplicare 10 per il numero di passi per fare 1 mm. Se per esempio per fare un 1 mm ho bisogno di 80 passi il processore farà 10 per 80 e saprà che deve muoversi di 800 passi per fare i 10 mm del comando... Nelle delta invece c'è tutta una geometri dietro che necessita di calcoli trigonometrici, perché per muovere di 10 mm su X deve muovere tutti e tre i carrelli di un tot che è il risultato di questi calcoli. Quindi il processore lavora di più, molto di più, moltissimo di più, ci sono radici e potenze da calcolare il tutto moltiplicato per tutti e tre le torri. Quindi a parità di processore su una delta si riduce drasticamente velocità e risoluzioni massime...Tieni anche presente che il processore, sempre lui, deve nel frattempo che esegue i comandi, controllare le temperature, controllare i pin se ci sono segnali strani (endstop o altro), leggere le temperature dai convertitori analogici digitali, calcolrarne il vero valore secondo delle tabelle dl tuo sensore, dare le informazioni al LCD etc etc, quindi altre miriade di cose da fare e nel frattempo deve calcolare il tutto per muoversi. E infatti sulle delta il mega comincia a far sentire, moto di più che su altri tipi di stampanti, i suoi limiti. Se vai a basse velocità e non chiedi troppo al processore poverino ce la fa pure, ma se lo spingi troppo rischi blocchi... Ed ecco che le 32 bit sulle delta fanno si che possano spingersi a velocità più alte, meccaniche permettendo...
-
Sono silenziosi per via dell'interpolazione di 256 micropassi e fino a 1.2 A di picco . I tmc 5160 ad esempio reggono 3A(se non ricordo male) silenziosamente senza scaldarsi e possono pilotare anche grandi motori. Il fatto che non possano veicolare molta corrente è relativo anche a quale motore hai . Io e te abbiamo gli stessi motori (anycubic da 1.5A simili a quelli della ender) e posso dirti che con v ref a 0.9 sugli assi vai tranquillo(pero io ho messo una ventola grossa, per dissipare il calore) ,ma se li metti all'estrusore bgm li i problemi ci possono essere se usi molta retrazione ....comunque la stampante sarà muta..comincerai a sentire rumori della meccanica che prima non sentivi...poi forse potrebbero anche non piacerti
-
Allego un PDF di un sito specializzato , riguardo ai microstep( il link si trova nella pagina reprap wiki che mi è stata girata da @iLMario). Ricordiamoci che la configurazione più diffusa sulle prusa è: puleggia GT2 a 20 denti motore 1.8° e consente ad 1/16 di step una precisione teorica di posizionamento di 12,5 micron (0.0125 mm è c'ho fatto caso da poco ) Nel pdf viene evidenziato che un alto numero di m/step (da non confondere con i 256 interpolati) facciano perdere coppia al motore e non è detto che diano più precisione A mio parere non ci sono driver migliori di altri (salvo alcuni casi e riferendosi sempre al nostro tipo di stampanti) ma driver che possono essere utili alle proprie esigenze io ho 4 tipi di driver : A4988 (in dotazione con la stampante) DVR 8825 che ho restituito non perchè non fossero buoni, ma perchè non abbastanza silenziosi per i miei standard TMC 2208 sulla trigorilla a 8bit TMC 2130 sulla 32 bit Quindi non mi costerebbe nulla utilizzare driver di diverso tipo a qualunque configurazione microstep. Sulla 32 bit potrei portare i m/step dei tmc (o prenderene un' altro tipo che lo consentano alti m/step) fino a 256 effettivi non interpolati , ma sarebbero inutilizzabili . Fino a poco tempo fa pensavo il contrario. Per raggiungere tali valori , e conservare alta coppia avrebbero bisogno di encoder rotativi (inutili nelle nostre configurazioni a basso costo ) come i motori brushless trifase. Ho menzionato i miei driver giusto per far capire che quanto riportato, nel post , non è perchè se sostengo che troppi micropassi forse non vanno bene , è perchè non li posso ottenere, ma solo che bisogna fare attenzione al mito "più micropassi più precisione" In sostanza meglio non eccedere con i microstep effettivi con il rischio che il motore perda passi (poi uno può decidere anche di impostare 1/64 ,basta che il motore non perda passi alle velocità desiderate) Se mi sono spiegato male fatemelo presente . Preciso : questa è la mia attuale opinione , posso anche ricredermi 6_Microstepping WP (1).pdf
-
in che senso ?
-
Dovresti farlo per la scienza .... 😂
-
😂no . Pensavo che di questi driver ne avessimo già parlato
-
lavorando a 1/32 sono comunque più "silenziosi" degli A4988 .Comunque la formula della vref per quei driver è: Vref= I *0.5 se hai resistenza 100 Vref=I*1.1 se hai resistenza 220 In caso te ne fossi dimenticato.
-
per i microstep dipende da come sistemi i jumper. La v ref la devi regolare in base al tipo di resistenza dell' LV8729 se 100 o 200 32 mstep non vuol dire più coppia . Più alzi i microstep meno coppia hai. Questi driver sono silenziosi da 1/64 e a 1/128 , con coppia molto scarsa rispetto a 1/16 .
-
Spenderò 1.50 euro per farmi spedire la originale. Anzi a questo punto rimetto il dado
-
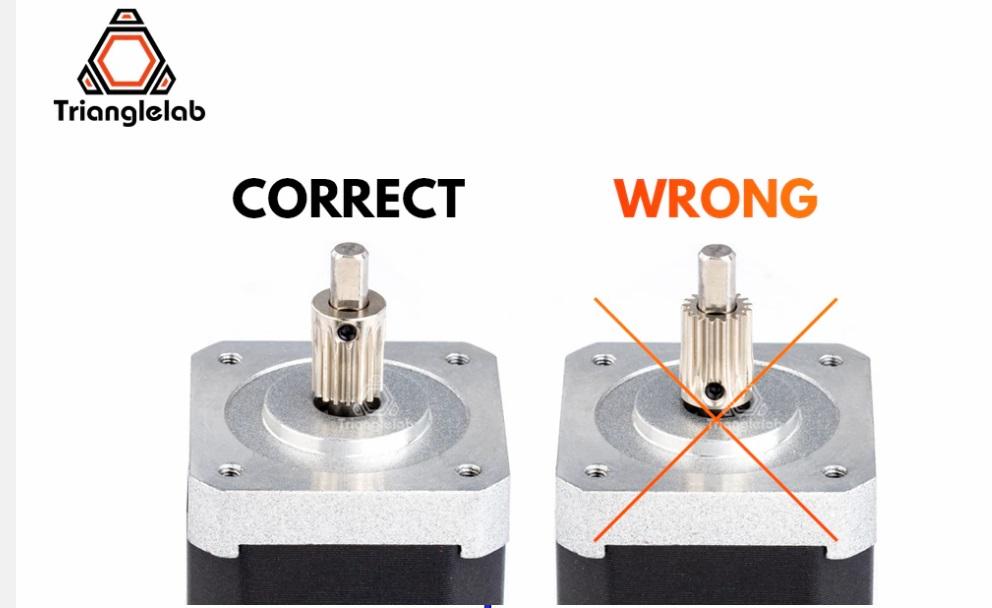
Devi metterci il filamento. Auto allinea gli ingranaggi e li mette in sede .Comunque adesso sappiamo come va regolato il pomello
-
vabbè anche il bgm originale si monta cosi. Secondo me fa fede la spunta anche se rossa guarda il manuale ufficiale 11. Creality CR-10 Kit. - Bondtech Support.pdf
-

-
il modo corretto è il primo a sinistra. Certo che metterlo di colore rosso😂...chissà ?forse anche i semafori in Cina sono al contrario
-
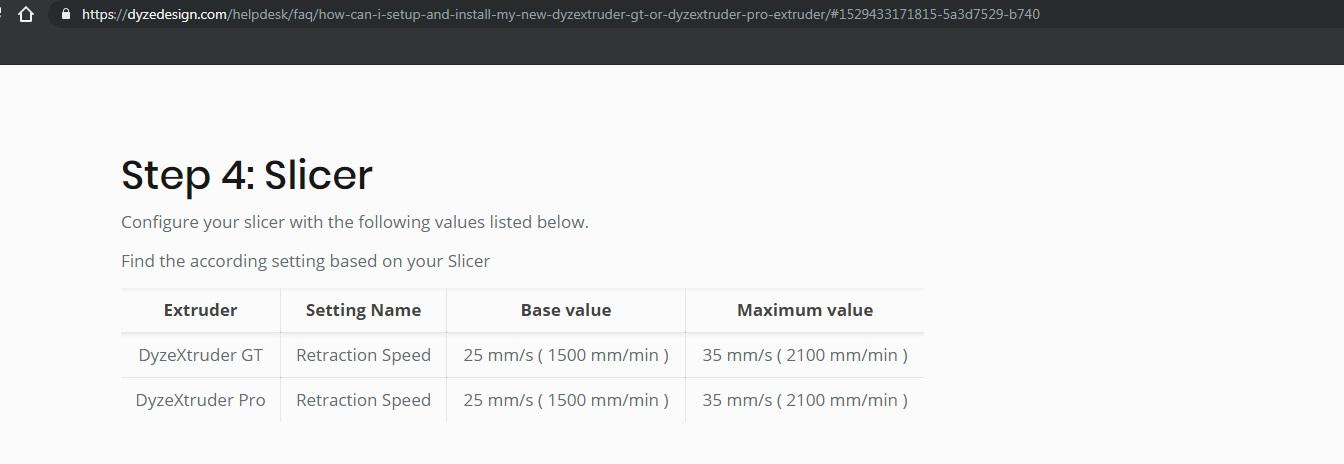
837 se usi il motore slimline che é a 0.9 non 1.8 Questo è vero. Ma l'unico post che ho trovato sui problemi di retrazione ,guardacaso riguarda un problema simile al nostro. Con questo voglio solo dire che gli stessi problemi che abbiamo sui cloni , li può avere anche l'originale. però se è un direct può essere verosimile. Dyze da i seguenti valori per i loro estrusori con riduzione considerando che il loro E step è 578 e il nostro 415 mi viene da pensare che le acc. sopra i 35/40mm non sia da considerare (il Dyze gt è bowden) 😂😂😂 Però il video di @Marcottt fa vedere che 60mm /s sono possibili....mi si sta fondendo la capoccia
-
la cosa strana è la risposta di e3d. Dicono di contattare l'assistenza ma non danno alcun suggerimento . Non dico che dovrebbero dare valori specifici ma almeno .che ne so...di non superare una data accelerazione.... Prima quando cercavo informazione sulla retrazione cazzi e mazzi del bontech , sul loro sito avevo trovato un link che parlava appunto di retrazione e velocità....si sottindendeva che non servissero alte acc. e molta distanza di retrazione in modo generico....ora il link non si trova più...boh Comunque anche il titan ha un valore step mm predefinito, ma anche loro sul sito suggericcono di calcolare gli step in maniera accurata seguendo il metodo classico: si vede al passo8
-
darei un'occhiata a questo
-
seguendo i calcoli del tipo di thingeverse il bgm non funzionerebbe nemmeno a 10mm/s...non avrebbe raggione di essere in commercio e nemmeno il Dyze che invece di avere 415 ha 578. Cosa strana anche il dyze dice di non ritrarre più di 1 o... 2 mm
-
Stavo per risponderti quasi come l'ultima volta : che bisogna controllare anche il numero di denti delle pulegge...ma rigurdando il tuo stesso link sembra che un ingranaggio con il numero di denti del bgm (14?) a 415 step velocità alte non le regge, e mi sa nemmeno 60mm/s.....ma il funzionamento suggerito a 1 mm/step non ha senso
-
questo l'ho fatto anche io ma ho utilizzato un loctite specifica per filetti che avevo.....ma mi sa tanto che è attack lo stesso, con etichetta diversa solo per la cronaca . "in quad step mode is only capable of 40 KHz" è vero ma non significa che una 8 bit (sia la trigorilla che tutte atmega 2560 ) non gestisce 1/16di step a 60mm non riesce a gestire da 1/32 in poi ."quad step mode"secondo me è da intender 1/64 mstep.
-
Sono cuscinetti cilindrici .Io li ho trovati già installati all' interno degli ingranaggi
-
questo beve troppo vino😂
-
Poiché riguarda il motore dell'estrusore penso che questa cosa sia da imputare ai valori del firmware. Il motore E che rispetto agli assi ha acc. feedrate jerk di solito molto elevati ed in teoria adatti per l'estrusore mk (a circa 92.5 step) in dotazione per le anycubic. Penso che dovrò ricontrollare tali valori nuovamente Quando estrude no, ma non dimentichiamoci la retrazione . 60mm/s li può usare quando ritrae
-
la stampa in fase di primo layer si blocca
Tomto ha risposto a SimonePb nella discussione Problemi generici o di qualità di stampa
nel carrello x c'è una pcb alla quale sono connessi ventola termistore ecc. Controlla che il connettore non sia allentato -
anycubic i3 mega firmware
Tomto ha risposto a Greed nella discussione Software di slicing, firmware e GCode
dimenticavo se nella sd card sono presenti caratteri cinesi (come in quella in dotazione) devi toglierli o non funzionerà l'lcd. C'è già un file hex pronto da utilizzare se sono gia stati girati i cavi il file hex lo puoi cariare da cura come un aggiornamento firrmware In alternativa il marlin "intero" lo devi caricare tramite l'ide di arduino