r88tl3ss
-
Numero contenuti
52 -
Iscritto
-
Ultima visita
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Tutti i contenuti di r88tl3ss
-

[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
non ho mai stampato PETG sto ancora trovando la quadra per avere pezzi resistenti e qualitativamente precisi, ho provato senza nastro ma non è andata molto bene 😅 avete consigli? per ora i parametri sono: - 230° hotend - 90° il piatto - ultrabase con solo nastro, niente lacca o colla - 6mm retraction a 50mm/s (rispetto a 4-40 del PLA) - 40mm/s di velocità con perimetri esterni a 20mm/s, infill 60mm/s - accellerazione 1600, jdev 0.13, k 0.75 - ho aumentato di 0.1mm lo z-offset diciamo che sono impostazini generali grossolane, accetto tutti i suggerimenti. VID_20210310_091911.mp4 -
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
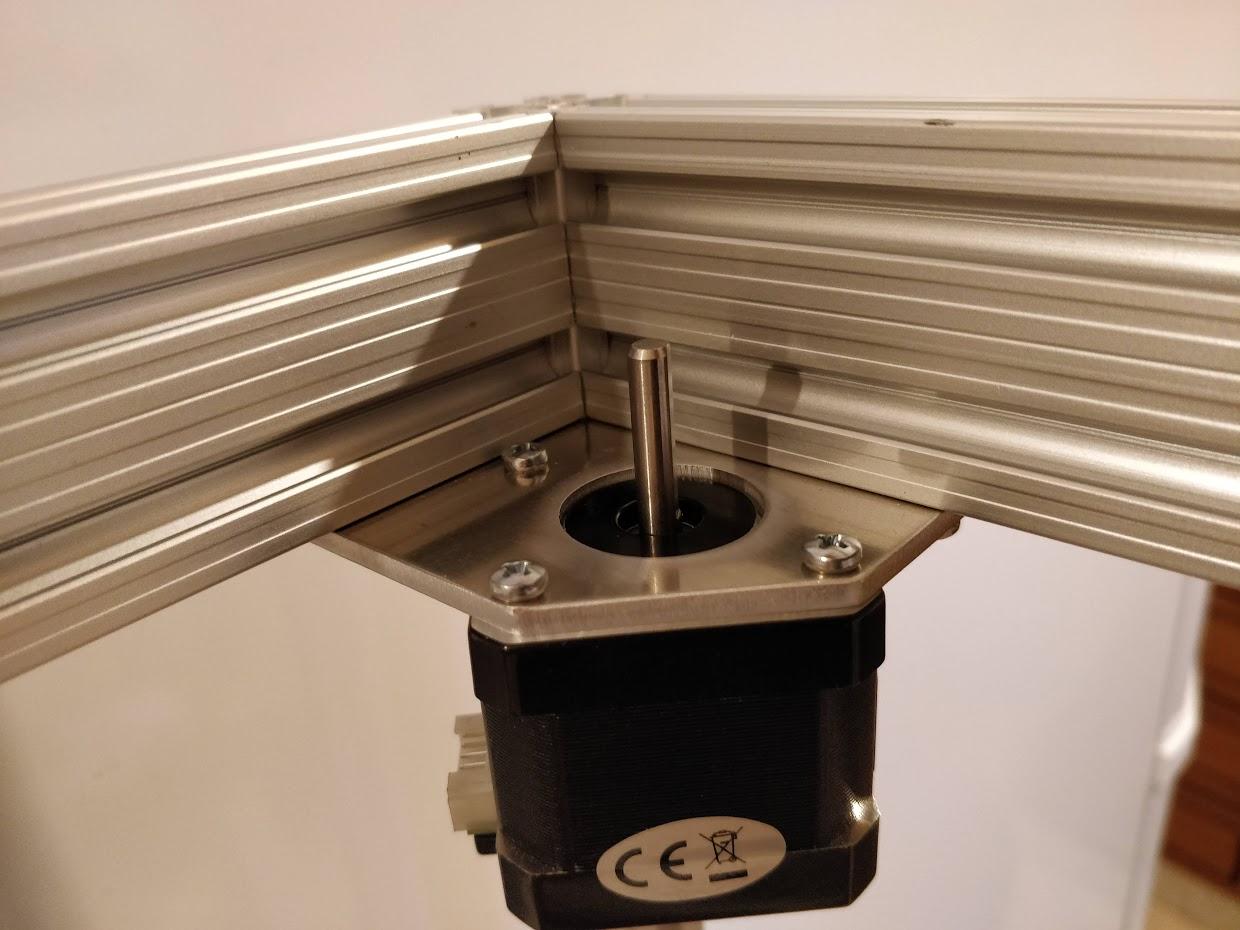
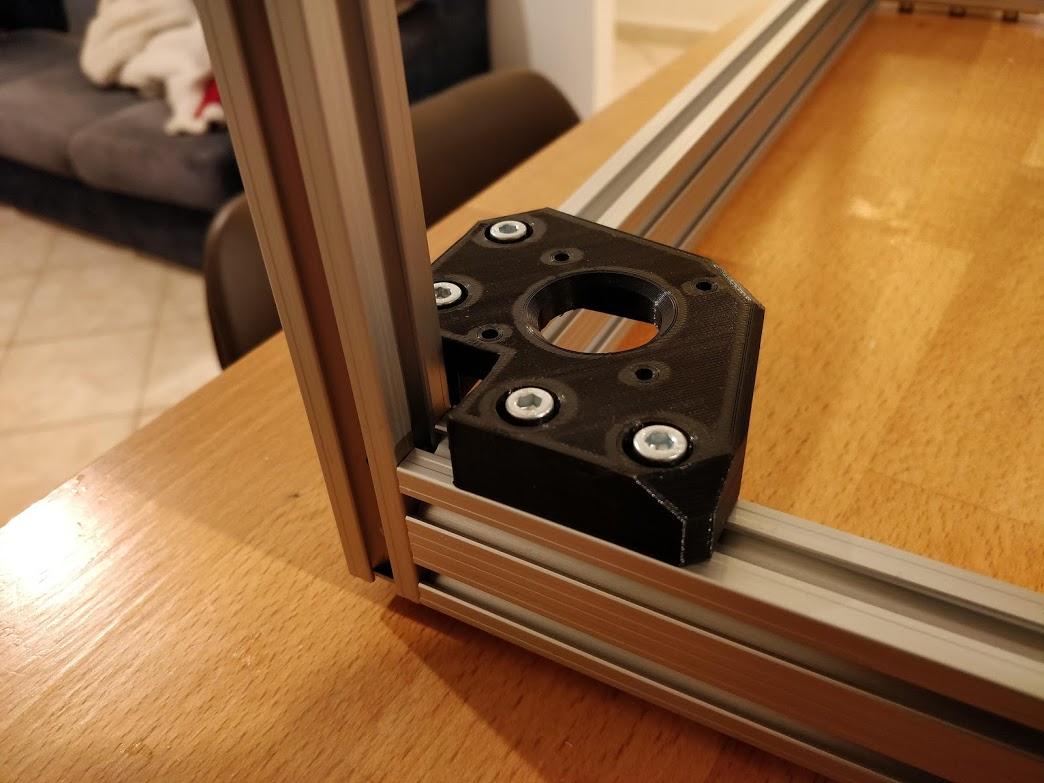
oggi tagliati laser anche i due supporti motore AB nedie due angoli posterori alti, venute bene ma soprattutto robuste.
-
Anycubic I3 - sostituzione step driver finita male! Aiuto!
r88tl3ss ha risposto a Fabrizio_ nella discussione Hardware e componenti
è più facile da usare in quanto scarica in automatico le dipendenze necessarie alla compilazione, e anche a livello di interfaccia è ben fatto, ti consiglierei di provare con quello. io ho entrambi ma per Marlin preferisco platform.io (che appunto fa parte di visualstudiocode). -
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
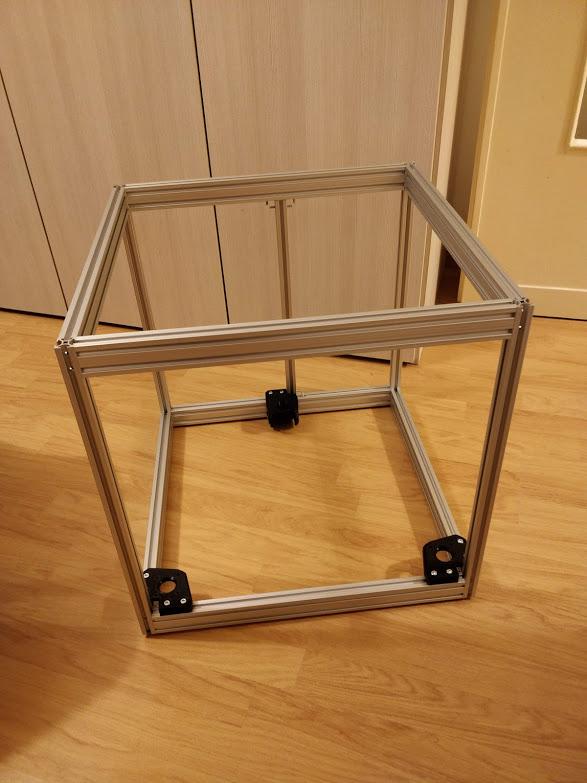
trovato un po' di tempo oggi per finire il telaio, son soddisfatto è più robusto di quello che pensavo, i 2040 fanno tanto ma forse è perchè ho anche esagerato con le viterie per quello che deve fare.. cercare di metterlo fuori squadra (si! è in squadra perfetto!) non è fattibile. come dicevo il telaio in basso sul fondo ci sono 4 squadrette in acciaio con i battenti, 24 viti, più 4 M5x60 passanti per i verticali.. oltre a questi ogni verticale 8 M5x60 nei 2040. il telaio superiore invece ha solo 16 M5x60 perchè non ho voluto mettere le squadrette in alto, sono antiestetiche.. negli angoli potesteriori di questa però mancano i due supporti per gli stepper AB che faranno comunque la stessa funzione, vedrò poi cosa fare per i due angolo frontali se sarà necessario aggiungere qualcosa o meno ma non credo. il supporto dello stepper Z posteriore è anche lui fissato in maniera overkill, e già ho modificato il disegno rat-rig originale (la mia versione include la barra verticale dentro il telaio e non in appoggio, quindi il supporto è più corto). i supporti frontali penso li ridisegnerò, rat-rig prevede di usare la barra lineare in quello spazio ma io credo andrò in appoggio visto che comunque devo tagliarla, e già che ci sono riprendo lo stile del supporto posteriore mettendo almeno altri 2 battenti nel 2040. qui andranno i supporti degli stepper AB, devo ancora farmi tagliare la piastrina al laser.
-
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
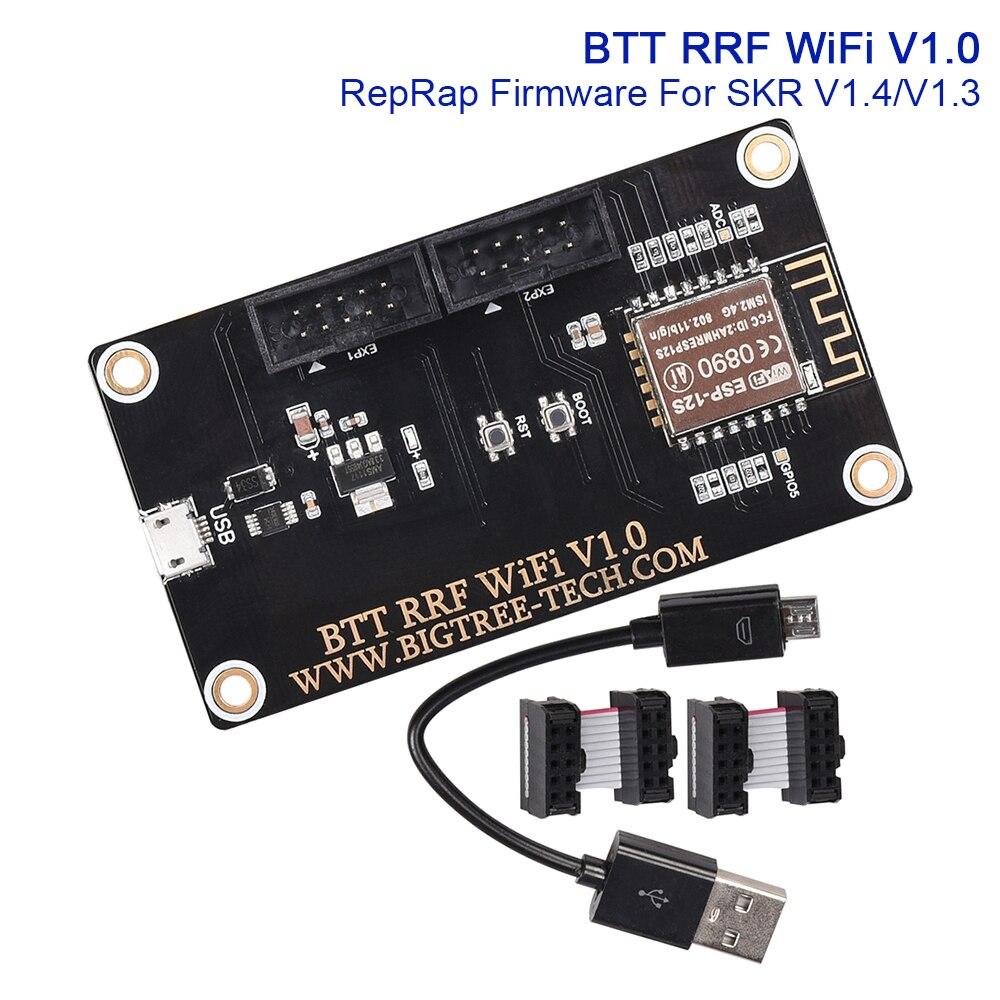
RepRap esiste come porting per le SRK sia con chip LPC che con chip STM, quindi 1.3 1.4 Turbo PRO e GTR, si trova qui https://github.com/gloomyandy/RepRapFirmware e praticamente è come se avessi una Duet alla fine dei conti, e la Duet Wifi ha appunto il suo sistema di controllo wifi con il DWC.. non è come OctoPrint ma è parte nativa di RepRap stesso, sono molto tentato di passare da Marlin a RRF anche per questo motivo. RRF essendo configurato e gestito da WebUI non necessita in realtà di un display, lo si può comandare da qualsiasi browser che sia da PC che da Tel che da un tablet.. per le SRK non sarebbe in teoria possibile ma son riusciti a fare il porting del DWC usando un ESP12 (il progetto testing originario usava un NodeMCU o un Wemos D1) e visto che funziona benissimo BTT ha fatto uscire un modulino stupidissimo d'espansione che permette il trasformare a tutto gli effetti le SKR in delle Duet2 Wifi E' una schedina d'espansione stupidissima ma mettendo RRF sulla SKR e il DWC su questa espansione riesci ad avere tutto in pacchetto RepRap completo e funzionante. Si ha dei vantaggi prima di tutto perchè non ti serve tutto un sistema Linux completo solo per far andare OctoPrint, non soffre di corruzione del filesystem o altre menate per dire, usare un Rpi4 per solo OctoPrint è decisamente overkill.. un ESP12 parte nel giro di pochissimi secondi e non ha kernel drivers filesystem e altre cose di cui doversi curare. OctoPrint è installabile su qualsiasi macchina linux, basta che essa abbia python3 con venv e una seriale, io l'ho usato anche su un vecchio box android cinese da 10€ su cui girava android e ora ha armbian, è possibile anche averlo in un container Docker, insomma gira un po' ovunque.. il Rpi Zero è troppo poco potente per questo tipo di lavoro, l'Orange Pi Zero è molto più simile a un Rpi3, è un quadcore 1.2ghz con 512mb di ram, l'ho usato perchè mi girava per casa inutilizzato ma anche se funziona alla perfezione non sono comunque molto convinto che continuerò ad usarlo soprattutto se DWC funzionerà bene. Un qualsiasi tablet android con un browser può essere usato per gestire DWC senza dover fare nulla, basta collegarsi all'indirizzo della stampante e appare, il webserver html5 che gira sull'ESP12 è fatto benone ma devo ancora valutarlo nel dettaglio. Alla fine trasformando una SRK in una Duet2Wifi la si può comandare da wifi via DWC con qualsiasi tipo di dispositivo pc tel tablet, con il touchscreen PanelDue (ed i suoi cloni), volendo anche con il BTT TFT35/50/70 con firmware modificato, quindi la scelta è parecchio ampia. Nella community pochi usano in realtà display esterni perchè con un DWC se ne perde un po' il senso. E' da provare, pare sia un porting parecchio stabile e funzionante, poi mal che vada se dovessero esserci troppe noie tornerei su Marlin e OctoPrint come già ho.
-
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
ahah ti scrivo nel tuo thread intanto così non faccio confusione 😄 -
Anycubic I3 - sostituzione step driver finita male! Aiuto!
r88tl3ss ha risposto a Fabrizio_ nella discussione Hardware e componenti
quando avrai la possibilità di stampare stampati un tunnel di dissipazione il supporto della ventolina originale, migliori sotto ogni punto di vista io ho messo questi cuscinetti in cima alle barre così da tenerle ferme non so se è la stessa cosa che hai fatto tu, si trova il disegno online ma per la mia era sbagliato l'ho ridisegnato al volo e stampato.. magari ti può tornare utile quel jumper serve ad alimentare la trigorilla via usb invece che via alimentazione, visto che arriva vuota dovrai metterlo su usb e scrivere il firmware, poi quando la reinstalli nella stampante lo rimetti a 12v altrimenti non si accende ahah guarda la cosa più semplice è scaricare l'ultima versione anycubic e usare visualstudiocode per compilare e scrivere almeno io mi son trovato bene così.
-
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
no neanche io prenderei la gtr, l'ho valutata ma poi accantonata per la pro con il nuovo modulino rrf che alla fine dei conti è un esp12 con due connettori, più che altro per pigrizia nel voler fare cose volanti. si da problemi di connessione persa ma con gli ultimi firmware e il config.ini a modo hanno sistemato, ma lo uso comunque sempre in marlin mode ma guarda cose già viste però magari poi due righe le scrivo magari ad altri interessa
-
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
e la miseria :O ma non l'hai fatta a mano vero? non capisco come possa succedere ma evidentemente può ahah ho visto in firma che hai una gtr e usi marlin con octoprint su un raspi4, non hai mai pensato di provare RepRap e Duet Web Control? la GTR è supportata. anche io uso octoprint su un orangepi zero integrato nella base della mia anycubic ma ho sempre l'impressione che non sia la soluzione ottimale, ho preso una skr pro con il wifi anche per quel motivo, usabile sia con marlin tft35 e octoprint che mollare tutto e usare rrf e dwc (ed eventualmente un tablet per la webui cosa che è decisamente superflua..) che ne pensi? -
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
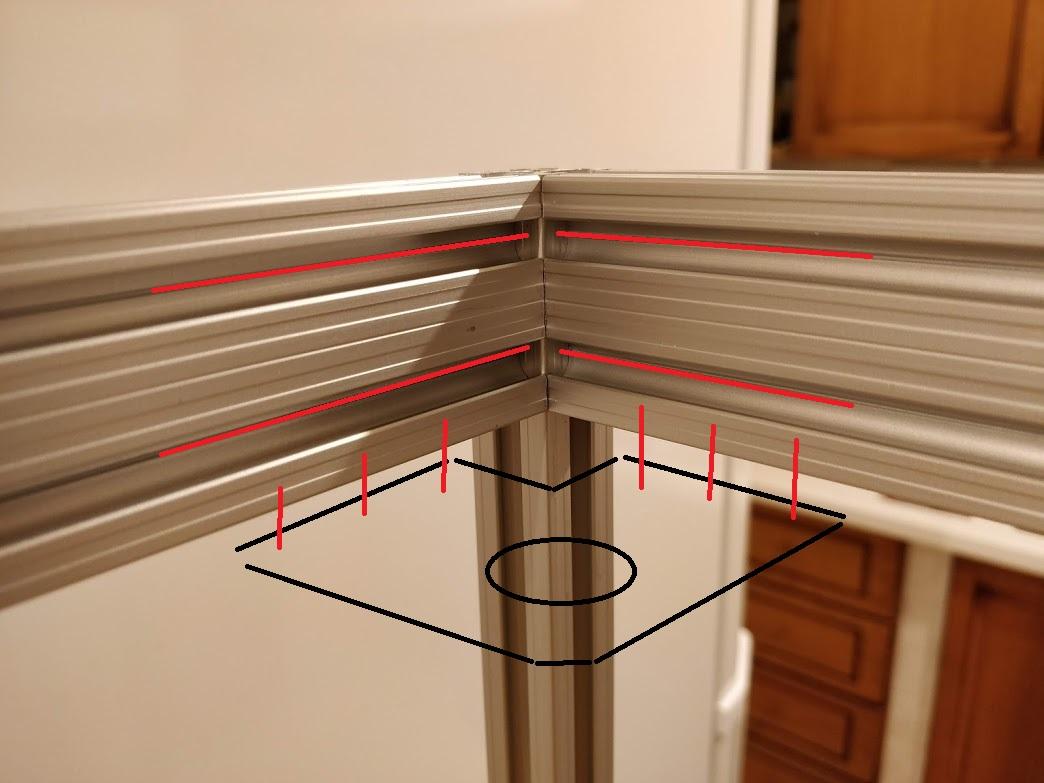
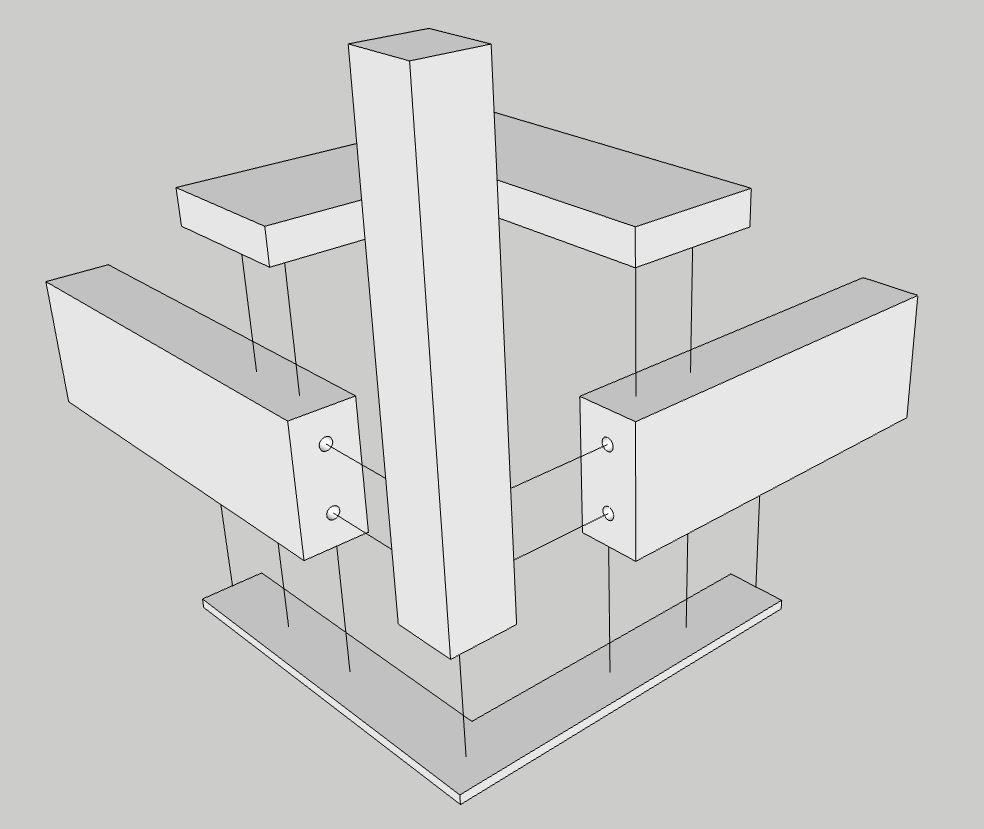
alla fine ho montato tutta la base e i 4 verticali, già così è parecchio rigido senza aver ancora la parte superiore di 2040, ed è anche tutto in squadra e a piombo.. misurerò alla fine ma credo andrà tutto bene. alla fine ho deciso di esagerare, ho filettato il centro delle 2040 della base (le righe orizzontali che si vedono) e bloccato il 2020 verticale con 4 M5x60 (al montaggio finale userò anche del ferma viti non permanente) usando la testa delle M5 come fossero dei dadi battenti al contrario. oltre a queste nella parte inferiore ho messo una staffa ad L in acciaio con 6 t-nut M5 mentre in corrispondenza della base del 2020 sempre filettato una M5. già questo da a quell'angolo robustezza, in più sopra si aggancerà il supporto per gli stepper Z anche loro con 4 M5 e dadi battenti. tra 2040 e staffa ad L metterò a sandwitch una lastra da 500x500 (al momento non c'è) che farà da base del contenitore per tutta l'elettronica. questo fatto per ognuno dei 4 angoli inferiori, sarà uguale per gli angoli superiori anche se non so ancora cosa mettere al posto della staffa ad L che non il top in quanto pulizia, magari me la faccio tagliare in alluminio, vediamo. eh si bisogna esser delicati anche se filettare l'alluminio è più facile che l'acciaio con cui ho un po' più d'esperienza ahaha comunque è stato abbastanza facile tutto fattibilissimo.
-
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
si me ne sono accorto andando a misurare ahah preso poi le M3 :) oggi iniziato a forare filettare tutto il telaio, poi magari in serata posto le foto di inizio montaggio 😄 -
Anycubic I3 - sostituzione step driver finita male! Aiuto!
r88tl3ss ha risposto a Fabrizio_ nella discussione Hardware e componenti
sono quasi sicuro che le versioni uart funzionino anche in standalone, almeno, i miei 2209 1.2 di BTT vanno sia in un modo che nell'altro. https://www.allwinrxz.com/popprint-tmc2209-v11-uart-stepper-motor-driver-256-micro-steps-current-28a-peak-vs-tmc22082130-suitable-controller-board-skr-v13-mks-gen-l-for-3d-printer-part-p-410099.htm vai con questi 🙂 oppure risparmiando qualcosa con questi https://www.allwinrxz.com/tmc2208-v30-modulo-driver-motore-passopasso-modalitagrave-uart-con-driver-per-dissipatore-di-calore-per-stampante-3d-p-410043.htm -
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
si anche io chiuderò il fondo perchè oltre a mettere i 3 stepper Z andrò ad installare tutta l'elettronica, vorrei riuscire a fare tutto nella maniera più pulita possibile, poi in appoggio metterò un'altra lastra per coprire il tutto. non si trovano da nessuna parte gli anti-backlash block con 2mm di avanzamento, gli unici che li vendono in inghilterra hanno quelli per le barre da 8mm 😕 tocca aspettare i cinesi. nel frattempo ci si prepara ad imbastire il tutto con il materiale già arrivato ovviamente dovevo fare la boiata di prendere tutto M5 e le guide linear sono M4.. tocca cambiare.
-
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
eh io lo trovo molto più affidabile che non le rotelle sinceramente, tra g34 e g29 io personalmente mi sento al sicuro nell'avere il piatto in parallelo con X e Y.. poi se volessi esser sicuro li lancerei prima di ogni stampa, cosa che io comunque non faccio. il sistema delle cinghie tanti non sono più così convinti che sia il migliore, soprattutto con delle tr8x8 e senza un qualche sistema di mitigazione del contraccolpo.. è uno dei motivi per cui ho preso delle tr8x2 oltre all'incremento della risoluzione, con babystepping io la differenza con le tr8x8 su Z la vedo. si è vero che non puoi evitare che uno perda step, ma su una risoluzione così alta la differenza sarebbe davvero minimale e rientrerebbe nel margine d'errore di misurazione a meno che uno dei due/tre non sia praticamente fermo e allora li il problema è diverso. -
Anycubic I3 - sostituzione step driver finita male! Aiuto!
r88tl3ss ha risposto a Fabrizio_ nella discussione Hardware e componenti
si sono compatibili, tutti i tmc lo sono, su firmware originale vanno in standalone girando semplicemente i cavi degli stepper come avevi già fatto.. è strano che sia successo, peccato. se non vuoi usarli in uart visto che immagino userai marlin personalizzato anycubic non devi fare altro, se li vuoi usare in uart (senza avere quindi più problemi di vref con il trimmerino e tester) devi fare un po' di cambiamenti di media difficoltà usando un cavetto split e modifiche firmware e hardware agli stepper stessi. prendere i 2209 standalone ha poco senso soprattutto sugli stepper della anycubic, risparmi qualcosa con i 2208. -
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
ma guarda come ho accennato sopra non uso gli endstops sulla Anycubic, non sono proprio più presenti, uso la sonda che allinea i due motori al piatto con accuratezza di 0.01 e ce ne cresce. tenerli sincronizzati probabilmente intendi che i motori si disabilitano dopo tot e si potrebbe perdere step/sync? su Z ho disabilitato quella funzione quindi a meno che non togli corrente alla stampante restano fermi in hold a 0.4 della corrente normale.. per il problema dopo l'accensione (dove potrebbero non essere allineati) basta un g34 e torna tutto parallelo (su 5 interazioni gliene bastano 2-3 per arrivare all'accuratezza impostata).. ti do ragione per quei due endstop difficili da tarare, li trovo proprio stupidi soprattutto su un dual stepper infatti son volati via subito. la BLV la conosco, quei profili laterali nel frame sono li quasi solo per supportare le guide o le canne, ci sono ben altri modi per mantenere rigidità strutturale.. la V-Core 3 da cui sto prendendo spunto ha appunto barre aggiuntive per creare uno scomparto posteriore per l'elettronica ma io ho volontariamente scelto di non metterle e di usare il frame della Pro 1.2. non credo costruirei mai al giorno d'oggi una corexy con 1 Z o 2 però le schede sono una grossa limitazione in effetti, servono 6 drivers e non tutte lo permettono.. BTT fa solo la SKR Pro e la GTX, altrimenti tocca andare su Duet aggiungendo le espansioni. -
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
io tutto il frame 2020 e 2040 l'ho pagato 65€ spedito con viti, gli angolari 15€, arrivati in due giorni.. mancano solo le squadrette rispetto ad un kit BLV insomma. Qui, provenienza CZ, consegna in 3-4 giorni, l'offerta 2x 450mm costa 32€ se non ricordo male. https://creaby.aliexpress.com/store/2918069 Come mai due quella specifica scelta per Z? -
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
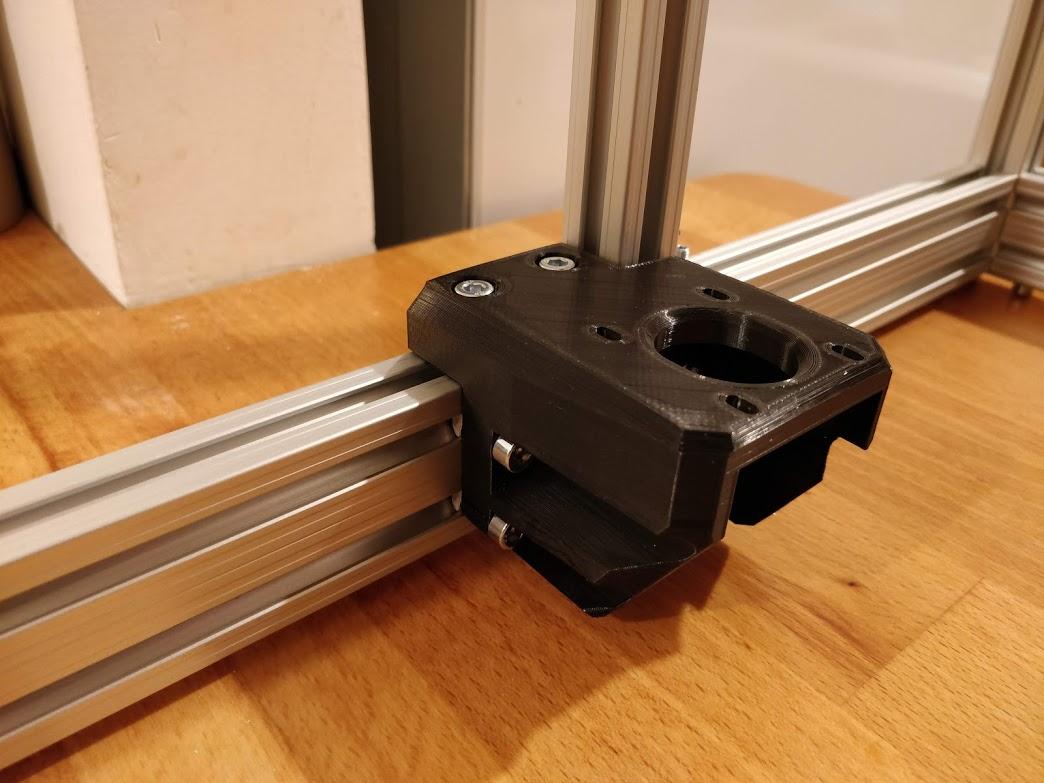
il kit di partenza credo abbia le guide, tutto il resto è configurabile e a parte https://www.ratrig.com/3d-printing-cnc/3d-printer-kits/all-3d-printer-kits/vcore3-test-configurator.html qui puoi avere un'idea del prezzo. da loro per ora non ho comprato nulla, ho preso tutto da altri venditori perchè risparmio tanto.. il kit costa assai ma guarda la plastica non mi preoccupa per ora, tutto il frame sarà comunque in metallo (userò angolari a scomparsa per dare rigidità) e non penso di usare le piastre come fanno loro.. le uniche due piastre che mi farò tagliare al laser in alluminio sono i supporti per i motori AB credo, quelli non li voglio in plastica, ma per il resto direi che non ci sono problemi anche perchè tutto il lavoro meccanico lo fanno le guide lineari, i porta cuscinetti e pulegge non mi preoccupano più di tanto per ora. https://v-core3.ratrig.com/ ho già modificato il supporto dello stepper posteriore Z perchè il piatto kinematic della V-Core Pro 1.3 usa i 2040 ma con l'asta verticale che non fa parte del frame principale mentre la V-Core 3 usa i 3030 quindi è niente.
-
[WIP] V-Core Mod
r88tl3ss ha risposto a r88tl3ss nella discussione La mia stampante 3D e il mio laboratorio
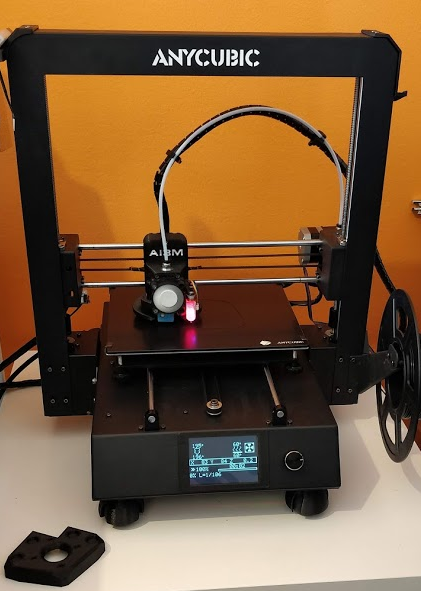
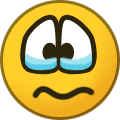
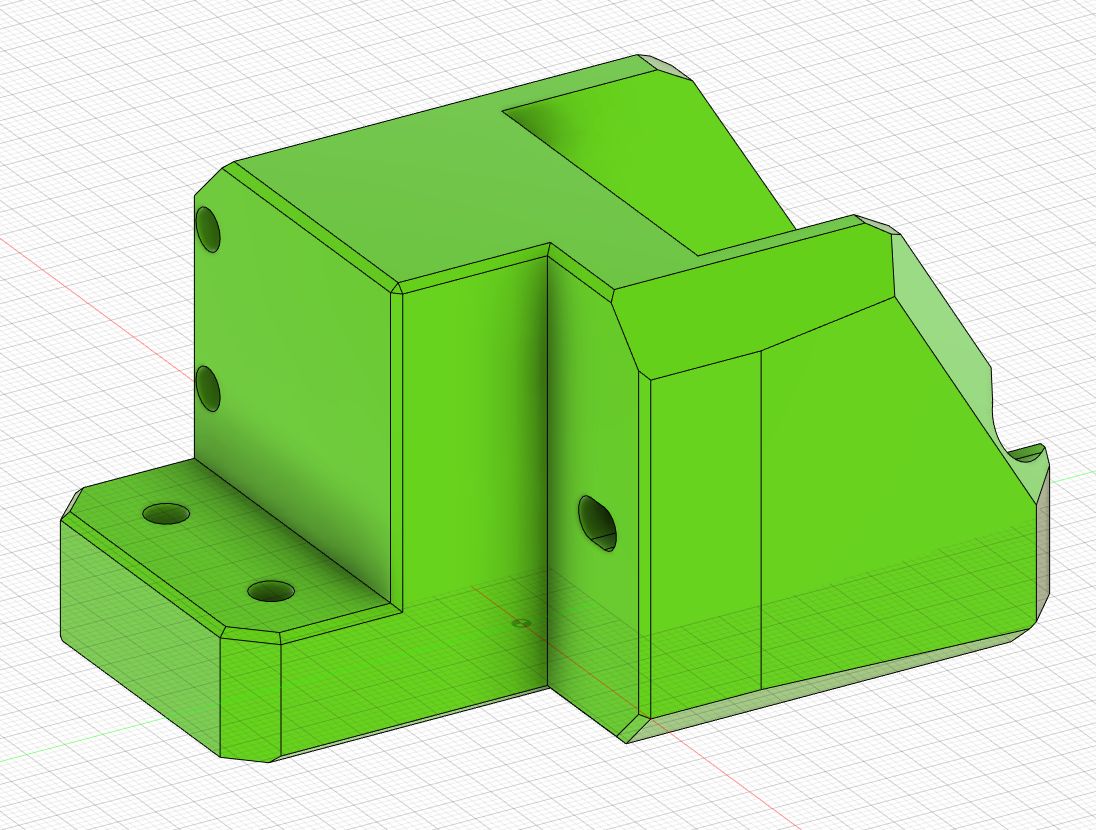
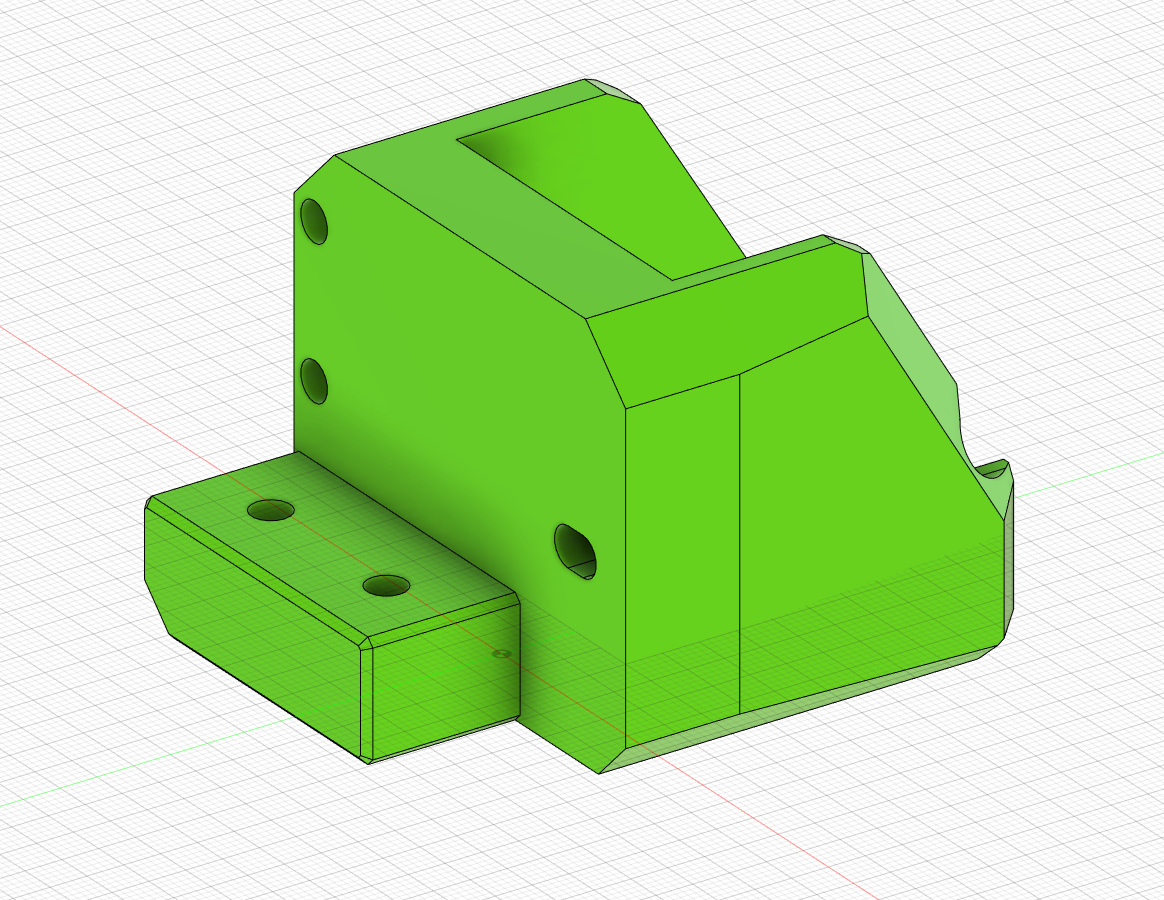
Devo dire che le barre lineari, anche se non di marca (HIWIN per dire) sono davvero ben fatte, scorrono lisce e tolleranza ottima sono soddisfatto, ordinato le prime 3 per verificare il venditore (arrivano dalla repubblica ceca) una volta arrivate prese anche le altre 3. La filettata anche lei è ottima, perfettamente dritta, il cursore lo cambierò con un blocco anti backlash. Questi i primi supporti per gli stepper Z frontali, stampati 0.2 con la Mega S devo dire che son venuti davvero bene.. Anche lei meriterebbe un thread apposito viste le modifiche (x-carrier completo, bltouch, z-auto allign senza endstop fisici, basata su Marlin 2.0.7.2 stable ma compilato da zero, 2209 e altra robetta).
-
Buondì a tutti, finalmente dopo aver sistemato la Mega S in maniera che mi stampi finalmente con buona qualità - e soprattutto precisione - mi attingo a costruirmi da zero la prima stampante completamente custom, una corexy da 310x310x400. La base sarà su piattaforma Rat Rig V-Core, precisamente sarà una V-Core Pro 1.3 modificata a mio gusto.. sono stati pubblicati nell'ultima settimana tutti file step e stl sia della nuovissima V-Core 3 che l'aggiornamento della V-Core Pro alla 1.3.. userò un frame basato su quest'ultima ma con gli assi XY presi dalla 3 quindi sarà un mix. I principali dati: - estruso 2020 e 2040 per il frame - triplo asse Z kinematic, guidato da 3 stepper e 3 driver indipendenti - 6 guide lineari mgn12h, 3 per gli assi z 2 per y e 1 per x - barre filettate TR8x2 a singolo start, quindi 2mm di avanzamento per ogni 360°, con giunti spider - 5 Nema 17 da 1.7A - 6 driver 2209 v1.2 - piatto in vetro microporoso, inizialmente da 310x310, vedrò se riesco a inserire un 350x350 nello stesso frame - x-carrier Eva2, hotend dragon o mosquitto (da decidere), estrusore orbiter dual drive (o non dovessi recuperarlo un BMG) - pulegge con 20T da 9mm, cinghie GT2 - SKR Pro 1.2 con modulo ESP, sistema 24V, firmware REPRAP - sensorless per X e Y, BLTouch per Z, nessun endstop fisico Ho già in casa 3 delle barre lineari, le filettate, i 2209, tutto il frame, a breve si inizia! PS: i file sono tutti pubblici su github e gdrive dei rispettivi creatori, disponibili da RAT RIG direttamente e Paweł Kucmus (per l'EVA2), i pezzi che modificherò saranno disponibili man mano che li monterò 🙂
-
ah ecco infatti sembrava che fosse custom, comunque meglio così se hai già risolto invertendo dai 🙂
-
ma che base per il firmware stai usando? queste definizioni di inversione funzionano solo se definisci la stampante o una combinazione, cosa che non è previsto in marlin ufficiale ma è custom. l'ultima marlin stable, intorno alla riga 1080 o giù di li nel configuration.h trovi: // @section machine // Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way. #define INVERT_X_DIR false #define INVERT_Y_DIR true #define INVERT_Z_DIR true // @section extruder // For direct drive extruder v9 set to true, for geared extruder set to false. #define INVERT_E0_DIR true #define INVERT_E1_DIR false #define INVERT_E2_DIR false #define INVERT_E3_DIR false #define INVERT_E4_DIR false #define INVERT_E5_DIR false #define INVERT_E6_DIR false #define INVERT_E7_DIR false e qui imposti il senso di rotazione di ogni stepper, se uno gira al contrario basta cambiare da true to false facendo delle prove.
-
Doppio stepper su asse Z: driver singolo o doppio?
r88tl3ss ha risposto a Morf90 nella discussione Hardware e componenti
se hai un sonda di livellamento puoi fare il livellamento di Z, con un solo driver non puoi in teoria puoi farlo anche senza sonda visto che avresti i 2209 ma sensorless homing su Z io non l'ho sperimentato -
no io attualmente sono a 590mA perchè sono partito dal basso, sono partito da 500 ma con 550mA mi è capitato di perdere ancora step su Y quindi ho alzato a 590 ma sono ormai almeno 16-17h di stampa dove non ho notato alcun problema ma forse serve più tempo per capirlo. appena finisco di sistemare l'ultimo Marlin provo a fare come dici tu partendo dall'alto e scalando man mano, tanto se non ci sono controindicazioni tanto vale fare così per esser sicuri.
-
ok quindi tu dici di partire dall'estremo alto (motore caldo) e scendere fino a che non lo sono più, in effetti ha più senso che non partire dall'estremo basso (perdita passi) e alzare fino a che non ci sono più problemi ma mi chiedevo se ci fossero delle regole per determinare un valore corretto. forse è per quello che la sezione trinamic imposta 800mA (che è un po' una via di mezzo) e bon così. ok, grazie :)