TOAD
-
Numero contenuti
19 -
Iscritto
-
Ultima visita
Obiettivi di TOAD
")





-

Problemi primo layer PETG
TOAD ha risposto a TOAD nella discussione Problemi generici o di qualità di stampa
Grazie, Ho pulito meglio il piatto ed effettivamente é migliorata la situazione. Anche prima lo pulivo dopo ogni stampa con alcol isopropilico ma credo che lo straccio che usavo fosse sporco e avesse qualche residuo unto. Ho cambiato lo straccio e pulito bene ed ora funziona! -
Problemi primo layer PETG
TOAD ha pubblicato una discussione in Problemi generici o di qualità di stampa
Ciao, Sto avendo qualche problema con il primo layer delle mie stampe con PETG. foto Il problema è quello mostrato in foto, in alcune parti sembra si creino dei grumi e quindi non aderisce bene al piatto. Alcune parti vengono perfette ed altre con problemi. Provando a far partire la stampa sempre con gli stessi settaggi dopo 2 o 3 volte che da problemi sul primo layer, inizia di nuovo a stampare bene e la stampa non ha problemi. Non capisco se sono dei difetti di produzione del filamento: PETG SUNLU (effettivamente il più economico che ho trovato in giro), o il fatto che il filamento abbia preso umidità: aperto dalla confezione e rimasto all'aria per 12 ore con umidità tra il 50 e 40% e temperatura 25/30 gradi (non sento scoppiettii tipici del filamento umido però), o se sto sbagliando qualche settaggio di stampa: temperatura primo layer 240 gradi e velocità di stampa primo layer 50mm/s per pareti e 100 mm/s per infill con accelerazione 500 mm/s (con Bambulab P1P e textured plate). Mi sembra di notare che il difetto si verifichi ad inizio movimento, potrebbe essere una questione di pressure advance? avevo fatto la calibrazione qualche settimana fa e attualmente uso un k=0.03. Grazie. -
Bambulab P1P problemi con PETG
TOAD ha risposto a TOAD nella discussione Problemi generici o di qualità di stampa
Come non detto... sono riuscito a fare bene un paio di stampe ma poi il problema é prepotentemente tornato peggio di prima e diffuso su tutti i pezzi della stampa. Facendo un po di test credo di aver capito che il problema sia la ventilazione troppo bassa. Ho aumentato il tempo massimo per la ventilazione per ogni layer (da 30 a 150 secondi) ed aumentato la velocità minima della ventola (dal 40 al 60%). In questo modo la ventilazione resta attiva anche per le pareti interne e l'infill. Inoltre per il momento sto stampando un pezzo alla volta per evitare di generare troppo calore (non sicurissimo di questa teoria). Per ora ho fatto 3 stampe e sono andate bene. Ho anche reimpostato i valori originali di definition e radius per assicurarmi che non incidessero ed effettivamente non hanno cambiato la situazione. Credo che il primo miglioramento delle stampe fosse stato causato da una momentanea temperatura inferiore della stanza. -
Bambulab P1P problemi con PETG
TOAD ha risposto a TOAD nella discussione Problemi generici o di qualità di stampa
Ho ridotto la definizione ed il problema è migliorato moltissimo! Grazie!! La stampa è quasi perfetta, rimane sempre lo stesso problema molto leggero in un punto, ma comunque la stampa viene molto bene in generale. Possibile che la Bambulab P1P non riesca ad elaborare abbastanza velocemente i dati nonostante la riduzione di definizione? Mi sembra strano... Forse c'è anche qualcos'altro dietro. -
Bambulab P1P problemi con PETG
TOAD ha risposto a TOAD nella discussione Problemi generici o di qualità di stampa
Grazie per il suggerimento, Se fossero la velocità e la temperatura però non mi torna perche le altre parti della stampa riescono perfettamente... non é una parte particolarmente difficile da stampare (infill e pareti interne, in cui ci sono sicuramente più curve e spigoli, le stampo a200 mm/sec e vengono perfetti!) Comunque proverò anche a ridurre velocità e temperatura se la riduzione di precisione non portasse a miglioramenti. -
Bambulab P1P problemi con PETG
TOAD ha risposto a TOAD nella discussione Problemi generici o di qualità di stampa
Grazie, ho visto che anche su bambuStudio è possibile semplificare il modello riducendo il numero di triangoli della mesh. I miei modelli hanno di base 5500 triangoli. Di quanto dovrei ridurli secondo te? Ho visto che ci sono anche le impostazione precision (che attualmente è impostata a 0.012) e slice gap closing radius (che attualmente è 0.049). Potrebbero influire anche questi parametri? -
Bambulab P1P problemi con PETG
TOAD ha pubblicato una discussione in Problemi generici o di qualità di stampa
Ciao, ho comprato da poco una bambulab p1p, ho fatto tutte le calibrazioni (sia con PLA che con PETG) ed iniziato a stampare. Con il PLA non ho nessun problema, la stampante va benissimo. Ho provato anche a fare un paio di stampe con PETG (SUNLU) e sto avendo qualche problema (metto foto). foto 1 foto 2 foto 3 foto 4 Il problema mi sembra simile al warping, la stampante in quel punto estrude su altra plastica e quindi la nuova plastica estrusa crea delle imperfezioni, però la stampa non si stacca dal piatto. Inoltre il problema si verifica solo su uno dei due oggetti stampati (identici)... Impostazioni di stampa: velocità max 200 mm/s (come consigliato da Bambulab con questo materiale) velocità parete esterna 150mm/s velocità pareti a sbalzo 50mm/s per 25-50%, 30mm/s per 50-75%, 10mm/s per 75-100% temperatura ugello 237 gradi (SUNLU indica 230/240) temperatura piatto 80 gradi velocità ventola: dal 30 al 100 % Ho provato a lanciare la stampa due volte ed il problema si è presentato identico, sempre nello stesso punto dello stesso oggetto, perciò escluderei un difetto del filamento (che avrebbe portato a problemi sparsi casualmente). Non riesco proprio a capire cosa possa essere visto che il problema si verifica su un solo oggetto... Qualcuno sa aiutarmi? Grazie! -
Aggiornamento firmware Marlin 2
TOAD ha risposto a TOAD nella discussione Software di slicing, firmware e GCode
Grazie mille a tutti per l'aiuto, credo che opterò come suggerito per una nuova scheda. -
Aggiornamento firmware Marlin 2
TOAD ha risposto a TOAD nella discussione Software di slicing, firmware e GCode
Ho fatto un passo avanti ma ancora non ho risolto. Ho risolto il problema di compilazione eliminando la riga che specifica la board nel file platformio.ini. eliminando la riga in automatico quando compila invece che ATmega1284p viene usato sanguino_atmega1284p. Non so se è corretto per il mio caso ma riesce a compilare correttamente. A questo punto mi dava comunque un errore di memoria, il nuovo firmware occupa il 100.2% della memoria disponibile. Ho risolto andando a decommentare un'impostazione in configuration.h che fa risparmiare circa 3000 bytes. (disable M503) Sono quindi riuscito a compilare ed il tutto occupa il 99.5% della memoria! Ora però quando connetto la stampante al computer per caricare il firmware mi da questo errore: Checking size .pio/build/melzi/firmware.elf Advanced Memory Usage is available via "PlatformIO Home > Project Inspect" RAM: [=== ] 29.6% (used 4842 bytes from 16384 bytes) Flash: [==========] 99.5% (used 126314 bytes from 126976 bytes) Building .pio/build/melzi/firmware.hex Configuring upload protocol... AVAILABLE: arduino CURRENT: upload_protocol = arduino Looking for upload port... Auto-detected: /dev/cu.usbserial-1420 Uploading .pio/build/melzi/firmware.hex avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x67 avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xea avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x0d avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xd6 avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xf6 avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0x0a avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xd6 avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xfe avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0x67 avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xea avrdude done. Thank you. *** [upload] Error 1 =================================== [FAILED] Took 176.65 seconds =================================== Environment Status Duration ------------- -------- ------------ melzi FAILED 00:02:56.650 ============================== 1 failed, 0 succeeded in 00:02:56.650 ============================== -
Aggiornamento firmware Marlin 2
TOAD ha risposto a TOAD nella discussione Software di slicing, firmware e GCode
ho modificato una riga del file platformio.ini [env:melzi] che prima era [env:ATmega1284p]. Credo che sia giusto ora, o comunque meglio di prima. [env:melzi] platform = atmelavr board = ATmega1284P framework = arduino extra_scripts = ${common.extra_scripts} build_flags = ${common.build_flags} lib_deps = ${common.lib_deps} monitor_speed = 115200 Quando vado a compilare mi da comunque errore ma diverso: Processing melzi (platform: atmelavr; board: ATmega1284P; framework: arduino) ------------------------------------------------------------------------------------------------------------------------------------- Verbose mode can be enabled via `-v, --verbose` option CONFIGURATION: https://docs.platformio.org/page/boards/atmelavr/ATmega1284P.html PLATFORM: Atmel AVR (3.4.0) > ATmega1284P HARDWARE: ATMEGA1284P 16MHz, 16KB RAM, 124KB Flash DEBUG: Current (simavr) On-board (simavr) PACKAGES: - framework-arduino-avr-mightycore @ 2.1.3 - toolchain-atmelavr @ 1.70300.191015 (7.3.0) Converting Marlin.ino LDF: Library Dependency Finder -> https://bit.ly/configure-pio-ldf LDF Modes: Finder ~ chain, Compatibility ~ soft Found 12 compatible libraries Scanning dependencies... Dependency Graph |-- U8glib-HAL @ 0.5.2 | |-- Wire @ 1.0 | |-- SPI @ 1.0 |-- Wire @ 1.0 |-- SPI @ 1.0 |-- Servo (MightyCore) @ 1.1.1 Building in release mode Compiling .pio/build/melzi/src/src/HAL/AVR/HAL.cpp.o Compiling .pio/build/melzi/src/src/HAL/AVR/HAL_SPI.cpp.o Compiling .pio/build/melzi/src/src/HAL/AVR/MarlinSerial.cpp.o Compiling .pio/build/melzi/src/src/HAL/AVR/Servo.cpp.o Compiling .pio/build/melzi/src/src/HAL/AVR/eeprom.cpp.o Compiling .pio/build/melzi/src/src/HAL/AVR/fast_pwm.cpp.o Compiling .pio/build/melzi/src/src/HAL/AVR/fastio.cpp.o Compiling .pio/build/melzi/src/src/HAL/AVR/u8g_com_HAL_AVR_sw_spi.cpp.o Compiling .pio/build/melzi/src/src/HAL/shared/Delay.cpp.o Compiling .pio/build/melzi/src/src/HAL/shared/HAL.cpp.o Compiling .pio/build/melzi/src/src/HAL/shared/MinSerial.cpp.o Compiling .pio/build/melzi/src/src/HAL/shared/eeprom_api.cpp.o Compiling .pio/build/melzi/src/src/HAL/shared/esp_wifi.cpp.o Compiling .pio/build/melzi/src/src/HAL/shared/servo.cpp.o Compiling .pio/build/melzi/src/src/MarlinCore.cpp.o Compiling .pio/build/melzi/src/src/core/serial.cpp.o Compiling .pio/build/melzi/src/src/core/utility.cpp.o Compiling .pio/build/melzi/src/src/feature/babystep.cpp.o Compiling .pio/build/melzi/src/src/gcode/calibrate/G28.cpp.o Compiling .pio/build/melzi/src/src/gcode/config/M200-M205.cpp.o Compiling .pio/build/melzi/src/src/gcode/config/M220.cpp.o Compiling .pio/build/melzi/src/src/gcode/config/M221.cpp.o Compiling .pio/build/melzi/src/src/gcode/config/M301.cpp.o Compiling .pio/build/melzi/src/src/gcode/config/M302.cpp.o Compiling .pio/build/melzi/src/src/gcode/config/M309.cpp.o Compiling .pio/build/melzi/src/src/gcode/config/M92.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M108_M112_M410.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M111.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M120_M121.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M17_M18_M84.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M211.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M400.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M80_M81.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M85.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M993_M994.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M997.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/M999.cpp.o Compiling .pio/build/melzi/src/src/gcode/control/T.cpp.o Compiling .pio/build/melzi/src/src/gcode/eeprom/M500-M504.cpp.o Compiling .pio/build/melzi/src/src/gcode/feature/advance/M900.cpp.o Compiling .pio/build/melzi/src/src/gcode/feature/digipot/M907-M910.cpp.o Compiling .pio/build/melzi/src/src/gcode/gcode.cpp.o Compiling .pio/build/melzi/src/src/gcode/gcode_d.cpp.o Compiling .pio/build/melzi/src/src/gcode/geometry/G92.cpp.o Compiling .pio/build/melzi/src/src/gcode/geometry/M206_M428.cpp.o Compiling .pio/build/melzi/src/src/gcode/host/M110.cpp.o Compiling .pio/build/melzi/src/src/gcode/host/M113.cpp.o Compiling .pio/build/melzi/src/src/gcode/host/M114.cpp.o Compiling .pio/build/melzi/src/src/gcode/host/M115.cpp.o Compiling .pio/build/melzi/src/src/gcode/host/M118.cpp.o Compiling .pio/build/melzi/src/src/gcode/host/M119.cpp.o Compiling .pio/build/melzi/src/src/gcode/lcd/M0_M1.cpp.o Compiling .pio/build/melzi/src/src/gcode/lcd/M117.cpp.o Compiling .pio/build/melzi/src/src/gcode/lcd/M145.cpp.o Compiling .pio/build/melzi/src/src/gcode/lcd/M300.cpp.o Compiling .pio/build/melzi/src/src/gcode/motion/G0_G1.cpp.o Compiling .pio/build/melzi/src/src/gcode/motion/G2_G3.cpp.o Compiling .pio/build/melzi/src/src/gcode/motion/G4.cpp.o Compiling .pio/build/melzi/src/src/gcode/motion/M290.cpp.o Compiling .pio/build/melzi/src/src/gcode/parser.cpp.o Compiling .pio/build/melzi/src/src/gcode/queue.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M1001.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M20.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M21_M22.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M23.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M24_M25.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M26.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M27.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M28_M29.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M30.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M32.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M33.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M34.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M524.cpp.o Compiling .pio/build/melzi/src/src/gcode/sd/M928.cpp.o Compiling .pio/build/melzi/src/src/gcode/stats/M31.cpp.o Compiling .pio/build/melzi/src/src/gcode/stats/M75-M78.cpp.o Compiling .pio/build/melzi/src/src/gcode/temp/M104_M109.cpp.o Compiling .pio/build/melzi/src/src/gcode/temp/M105.cpp.o Compiling .pio/build/melzi/src/src/gcode/temp/M106_M107.cpp.o Compiling .pio/build/melzi/src/src/gcode/temp/M140_M190.cpp.o Compiling .pio/build/melzi/src/src/gcode/temp/M141_M191.cpp.o Compiling .pio/build/melzi/src/src/gcode/temp/M155.cpp.o Compiling .pio/build/melzi/src/src/gcode/temp/M303.cpp.o Compiling .pio/build/melzi/src/src/gcode/units/M82_M83.cpp.o Compiling .pio/build/melzi/src/src/inc/Warnings.cpp.o Compiling .pio/build/melzi/src/src/lcd/dogm/lcdprint_u8g.cpp.o Compiling .pio/build/melzi/src/src/lcd/dogm/marlinui_DOGM.cpp.o Compiling .pio/build/melzi/src/src/lcd/dogm/status_screen_DOGM.cpp.o Compiling .pio/build/melzi/src/src/lcd/dogm/status_screen_lite_ST7920.cpp.o In file included from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:19:0, from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/Arduino.h:301, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/../shared/Marduino.h:36, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/HAL.h:26, from Marlin/src/lcd/dogm/../../inc/../HAL/HAL.h:30, from Marlin/src/lcd/dogm/../../inc/MarlinConfig.h:31, from Marlin/src/lcd/dogm/HAL_LCD_class_defines.h:24, from Marlin/src/lcd/dogm/marlinui_DOGM.h:31, from Marlin/src/lcd/dogm/lcdprint_u8g.cpp:14: /Users/tommaso/.platformio/packages/toolchain-atmelavr/avr/include/avr/power.h: In function 'void clock_prescale_set(clock_div_t)': /Users/tommaso/.platformio/packages/toolchain-atmelavr/avr/include/avr/power.h:1511:21: error: '_BV' was not declared in this scope uint8_t __tmp = _BV(CLKPCE); ^~~ In file included from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:14:0, from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/Arduino.h:301, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/../shared/Marduino.h:36, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/HAL.h:26, from Marlin/src/lcd/dogm/../../inc/../HAL/HAL.h:30, from Marlin/src/lcd/dogm/../../inc/MarlinConfig.h:31, from Marlin/src/lcd/dogm/HAL_LCD_class_defines.h:24, from Marlin/src/lcd/dogm/marlinui_DOGM.h:31, from Marlin/src/lcd/dogm/lcdprint_u8g.cpp:14: /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h: In function 'void enableSleep()': /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:81:5: error: '_BV' was not declared in this scope sleep_enable(); ^ /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h: In function 'void disableSleep()': /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:90:5: error: '_BV' was not declared in this scope sleep_disable(); ^ /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h: In function 'void sleepMode(uint8_t)': /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:102:9: error: '_BV' was not declared in this scope set_sleep_mode(SLEEP_MODE_IDLE); ^ /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:107:9: error: '_BV' was not declared in this scope set_sleep_mode(SLEEP_MODE_ADC); ^ compilation terminated due to -fmax-errors=5. *** [.pio/build/melzi/src/src/lcd/dogm/lcdprint_u8g.cpp.o] Error 1 In file included from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:19:0, from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/Arduino.h:301, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/../shared/Marduino.h:36, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/HAL.h:26, from Marlin/src/lcd/dogm/../../inc/../HAL/HAL.h:30, from Marlin/src/lcd/dogm/../../inc/MarlinConfig.h:31, from Marlin/src/lcd/dogm/HAL_LCD_class_defines.h:24, from Marlin/src/lcd/dogm/marlinui_DOGM.h:31, from Marlin/src/lcd/dogm/marlinui_DOGM.cpp:42: /Users/tommaso/.platformio/packages/toolchain-atmelavr/avr/include/avr/power.h: In function 'void clock_prescale_set(clock_div_t)': /Users/tommaso/.platformio/packages/toolchain-atmelavr/avr/include/avr/power.h:1511:21: error: '_BV' was not declared in this scope uint8_t __tmp = _BV(CLKPCE); ^~~ In file included from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:14:0, from /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/Arduino.h:301, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/../shared/Marduino.h:36, from Marlin/src/lcd/dogm/../../inc/../HAL/./AVR/HAL.h:26, from Marlin/src/lcd/dogm/../../inc/../HAL/HAL.h:30, from Marlin/src/lcd/dogm/../../inc/MarlinConfig.h:31, from Marlin/src/lcd/dogm/HAL_LCD_class_defines.h:24, from Marlin/src/lcd/dogm/marlinui_DOGM.h:31, from Marlin/src/lcd/dogm/marlinui_DOGM.cpp:42: /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h: In function 'void enableSleep()': /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:81:5: error: '_BV' was not declared in this scope sleep_enable(); ^ /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h: In function 'void disableSleep()': /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:90:5: error: '_BV' was not declared in this scope sleep_disable(); ^ /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h: In function 'void sleepMode(uint8_t)': /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:102:9: error: '_BV' was not declared in this scope set_sleep_mode(SLEEP_MODE_IDLE); ^ /Users/tommaso/.platformio/packages/framework-arduino-avr-mightycore/cores/MightyCore/wiring_extras.h:107:9: error: '_BV' was not declared in this scope set_sleep_mode(SLEEP_MODE_ADC); ^ compilation terminated due to -fmax-errors=5. *** [.pio/build/melzi/src/src/lcd/dogm/marlinui_DOGM.cpp.o] Error 1 ==================================================== [FAILED] Took 76.83 seconds ==================================================== Environment Status Duration ------------- -------- ------------ melzi FAILED 00:01:16.826 =============================================== 1 failed, 0 succeeded in 00:01:16.826 =============================================== -
Aggiornamento firmware Marlin 2
TOAD ha risposto a TOAD nella discussione Software di slicing, firmware e GCode
Questo è l'errore che esce: Processing melzi (board: sanguino_atmega1284p; platform: atmelavr@~3.4) -------------------------------------------------------------------------------------------------------------------------------- Verbose mode can be enabled via `-v, --verbose` option CONFIGURATION: https://docs.platformio.org/page/boards/atmelavr/sanguino_atmega1284p.html PLATFORM: Atmel AVR (3.4.0) > Sanguino ATmega1284p (16MHz) HARDWARE: ATMEGA1284P 16MHz, 16KB RAM, 124KB Flash DEBUG: Current (simavr) On-board (simavr) PACKAGES: - toolchain-atmelavr @ 1.70300.191015 (7.3.0) LDF: Library Dependency Finder -> https://bit.ly/configure-pio-ldf LDF Modes: Finder ~ chain, Compatibility ~ soft Found 1 compatible libraries Scanning dependencies... Dependency Graph |-- U8glib-HAL @ 0.5.2 Building in release mode Compiling .pio/build/melzi/src/src/HAL/AVR/HAL.o Compiling .pio/build/melzi/src/src/HAL/AVR/HAL_SPI.o Compiling .pio/build/melzi/src/src/HAL/AVR/MarlinSerial.o Compiling .pio/build/melzi/src/src/HAL/AVR/Servo.o In file included from Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/HAL.h:26:0, from Marlin/src/HAL/AVR/../../inc/../HAL/HAL.h:30, from Marlin/src/HAL/AVR/../../inc/MarlinConfig.h:31, from Marlin/src/HAL/AVR/HAL_SPI.cpp:34: Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/../shared/Marduino.h:36:10: fatal error: Arduino.h: No such file or directory ***************************************************************** * Looking for Arduino.h dependency? Check our library registry! * * CLI > platformio lib search "header:Arduino.h" * Web > https://registry.platformio.org/search?q=header:Arduino.h * ***************************************************************** #include <Arduino.h> // NOTE: If included earlier then this line is a NOOP ^~~~~~~~~~~ compilation terminated. In file included from Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/HAL.h:26:0, from Marlin/src/HAL/AVR/../../inc/../HAL/HAL.h:30, from Marlin/src/HAL/AVR/../../inc/MarlinConfig.h:31, from Marlin/src/HAL/AVR/MarlinSerial.cpp:39: Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/../shared/Marduino.h:36:10: fatal error: Arduino.h: No such file or directory ***************************************************************** * Looking for Arduino.h dependency? Check our library registry! * * CLI > platformio lib search "header:Arduino.h" * Web > https://registry.platformio.org/search?q=header:Arduino.h * ***************************************************************** #include <Arduino.h> // NOTE: If included earlier then this line is a NOOP ^~~~~~~~~~~ compilation terminated. *** [.pio/build/melzi/src/src/HAL/AVR/MarlinSerial.o] Error 1 In file included from Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/HAL.h:26:0, from Marlin/src/HAL/AVR/../../inc/../HAL/HAL.h:30, from Marlin/src/HAL/AVR/../../inc/MarlinConfig.h:31, from Marlin/src/HAL/AVR/Servo.cpp:55: Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/../shared/Marduino.h:36:10: fatal error: Arduino.h: No such file or directory ***************************************************************** * Looking for Arduino.h dependency? Check our library registry! * * CLI > platformio lib search "header:Arduino.h" * Web > https://registry.platformio.org/search?q=header:Arduino.h * ***************************************************************** #include <Arduino.h> // NOTE: If included earlier then this line is a NOOP ^~~~~~~~~~~ compilation terminated. *** [.pio/build/melzi/src/src/HAL/AVR/Servo.o] Error 1 *** [.pio/build/melzi/src/src/HAL/AVR/HAL_SPI.o] Error 1 In file included from Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/HAL.h:26:0, from Marlin/src/HAL/AVR/../../inc/../HAL/HAL.h:30, from Marlin/src/HAL/AVR/../../inc/MarlinConfig.h:31, from Marlin/src/HAL/AVR/HAL.cpp:24: Marlin/src/HAL/AVR/../../inc/../HAL/./AVR/../shared/Marduino.h:36:10: fatal error: Arduino.h: No such file or directory ***************************************************************** * Looking for Arduino.h dependency? Check our library registry! * * CLI > platformio lib search "header:Arduino.h" * Web > https://registry.platformio.org/search?q=header:Arduino.h * ***************************************************************** #include <Arduino.h> // NOTE: If included earlier then this line is a NOOP ^~~~~~~~~~~ compilation terminated. *** [.pio/build/melzi/src/src/HAL/AVR/HAL.o] Error 1 ================================================== [FAILED] Took 5.71 seconds ================================================== Environment Status Duration ------------- -------- ------------ melzi FAILED 00:00:05.708 ============================================ 1 failed, 0 succeeded in 00:00:05.708 ============================================ -
Aggiornamento firmware Marlin 2
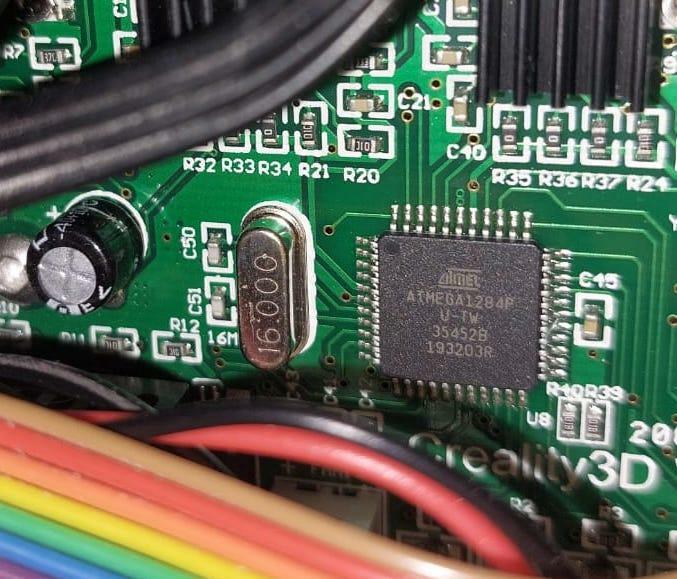
TOAD ha pubblicato una discussione in Software di slicing, firmware e GCode
Buongiorno a tutti, sto avendo problemi ad aggiornare il firmware alla mia stampante ender 3 pro. Vorrei iniziare ad usare Marlin 2 principalmente per poter modificare il parametro del linear advance. La mia stampante monta una scheda melzi v1.1.6.2 e processore atmega1284p. (foto) Ho scaricato il firmware e la cartella Configurations dal sito ufficiale Marlin. Ho estratto i file di esempio per la Creality ender 3 pro v1 ed ho copiato le 4 cartelle (config, config_advance, Bootscreen e StatusScreen) nella cartella Marlin. Utilizzando Platform.io su Visual Studio Code ho aperto la cartella Marlin 2.1.2, ho controllato i file configuartion.h e configuration_adv.h (dove ho decommentato l'impostazione del linear advance). Ho provato a compilare ma mi da errore, credo che il problema siano le impostazioni nel file Platformio.ini che non riesco proprio a capire come mettere. (ho provato diverse combinazioni ma mi da sempre qualche errore) Qualcuno sa aiutarmi? Grazie mille, questo è il contenuto del file Platformio.ini: # # Marlin Firmware # PlatformIO Configuration File # # For detailed documentation with EXAMPLES: # # https://docs.platformio.org/en/latest/projectconf/index.html # # Automatic targets - enable auto-uploading #targets = upload [platformio] src_dir = Marlin boards_dir = buildroot/share/PlatformIO/boards default_envs = melzi include_dir = Marlin extra_configs = Marlin/config.ini ini/avr.ini ini/due.ini ini/esp32.ini ini/features.ini ini/lpc176x.ini ini/native.ini ini/samd21.ini ini/samd51.ini ini/stm32-common.ini ini/stm32f0.ini ini/stm32f1-maple.ini ini/stm32f1.ini ini/stm32f4.ini ini/stm32f7.ini ini/stm32h7.ini ini/stm32g0.ini ini/teensy.ini ini/renamed.ini # # The 'common' section applies to most Marlin builds. # # By default platformio build will abort after 5 errors. # Remove '-fmax-errors=5' from build_flags below to see all. # [common] build_flags = -g3 -D__MARLIN_FIRMWARE__ -DNDEBUG -fmax-errors=5 extra_scripts = pre:buildroot/share/PlatformIO/scripts/configuration.py pre:buildroot/share/PlatformIO/scripts/common-dependencies.py pre:buildroot/share/PlatformIO/scripts/common-cxxflags.py pre:buildroot/share/PlatformIO/scripts/preflight-checks.py post:buildroot/share/PlatformIO/scripts/common-dependencies-post.py lib_deps = default_src_filter = +<src/*> -<src/config> -<src/HAL> +<src/HAL/shared> -<src/tests> -<src/lcd/HD44780> -<src/lcd/TFTGLCD> -<src/lcd/dogm> -<src/lcd/tft> -<src/lcd/tft_io> -<src/HAL/STM32/tft> -<src/HAL/STM32F1/tft> -<src/lcd/e3v2/common> -<src/lcd/e3v2/creality> -<src/lcd/e3v2/proui> -<src/lcd/e3v2/jyersui> -<src/lcd/e3v2/marlinui> -<src/lcd/menu> -<src/lcd/menu/game/game.cpp> -<src/lcd/menu/game/brickout.cpp> -<src/lcd/menu/game/invaders.cpp> -<src/lcd/menu/game/maze.cpp> -<src/lcd/menu/game/snake.cpp> -<src/lcd/menu/menu_backlash.cpp> -<src/lcd/menu/menu_bed_corners.cpp> -<src/lcd/menu/menu_bed_leveling.cpp> -<src/lcd/menu/menu_cancelobject.cpp> -<src/lcd/menu/menu_delta_calibrate.cpp> -<src/lcd/menu/menu_filament.cpp> -<src/lcd/menu/menu_info.cpp> -<src/lcd/menu/menu_job_recovery.cpp> -<src/lcd/menu/menu_language.cpp> -<src/lcd/menu/menu_led.cpp> -<src/lcd/menu/menu_media.cpp> -<src/lcd/menu/menu_mmu2.cpp> -<src/lcd/menu/menu_password.cpp> -<src/lcd/menu/menu_power_monitor.cpp> -<src/lcd/menu/menu_spindle_laser.cpp> -<src/lcd/menu/menu_temperature.cpp> -<src/lcd/menu/menu_tmc.cpp> -<src/lcd/menu/menu_touch_screen.cpp> -<src/lcd/menu/menu_tramming.cpp> -<src/lcd/menu/menu_ubl.cpp> -<src/lcd/menu/menu_x_twist.cpp> -<src/lcd/extui/anycubic_chiron> -<src/lcd/extui/anycubic_i3mega> -<src/lcd/extui/dgus> -<src/lcd/extui/dgus/fysetc> -<src/lcd/extui/dgus/hiprecy> -<src/lcd/extui/dgus/mks> -<src/lcd/extui/dgus/origin> -<src/lcd/extui/dgus_reloaded> -<src/lcd/extui/example> -<src/lcd/extui/ftdi_eve_touch_ui> -<src/lcd/extui/malyan> -<src/lcd/extui/mks_ui> -<src/lcd/extui/nextion> -<src/lcd/lcdprint.cpp> -<src/lcd/touch/touch_buttons.cpp> -<src/sd/usb_flashdrive/lib-uhs2> -<src/sd/usb_flashdrive/lib-uhs3> -<src/sd/usb_flashdrive/Sd2Card_FlashDrive.cpp> -<src/sd/cardreader.cpp> -<src/sd/Sd2Card.cpp> -<src/sd/SdBaseFile.cpp> -<src/sd/SdFatUtil.cpp> -<src/sd/SdFile.cpp> -<src/sd/SdVolume.cpp> -<src/HAL/shared/backtrace> -<src/HAL/shared/cpu_exception> -<src/HAL/shared/eeprom_if_i2c.cpp> -<src/HAL/shared/eeprom_if_spi.cpp> -<src/feature/adc> -<src/gcode/feature/adc> -<src/feature/ammeter.cpp> -<src/feature/babystep.cpp> -<src/feature/backlash.cpp> -<src/feature/baricuda.cpp> -<src/gcode/feature/baricuda> -<src/feature/bedlevel/abl> -<src/gcode/bedlevel/abl> -<src/feature/bedlevel/bdl> -<src/gcode/probe/M102.cpp> -<src/feature/bedlevel/mbl> -<src/gcode/bedlevel/mbl> -<src/feature/bedlevel/ubl> -<src/gcode/bedlevel/ubl> -<src/feature/bedlevel/hilbert_curve.cpp> -<src/feature/binary_stream.cpp> -<src/libs/heatshrink> -<src/feature/bltouch.cpp> -<src/feature/cancel_object.cpp> -<src/gcode/feature/cancel> -<src/feature/caselight.cpp> -<src/gcode/feature/caselight> -<src/feature/closedloop.cpp> -<src/feature/controllerfan.cpp> -<src/gcode/feature/controllerfan> -<src/feature/cooler.cpp> -<src/gcode/temp/M143_M193.cpp> -<src/feature/dac> -<src/feature/digipot> -<src/feature/direct_stepping.cpp> -<src/gcode/motion/G6.cpp> -<src/feature/e_parser.cpp> -<src/feature/easythreed_ui.cpp> -<src/feature/encoder_i2c.cpp> -<src/feature/ethernet.cpp> -<src/gcode/feature/network/M552-M554.cpp> -<src/feature/fancheck.cpp> -<src/feature/fanmux.cpp> -<src/feature/filwidth.cpp> -<src/gcode/feature/filwidth> -<src/feature/fwretract.cpp> -<src/gcode/feature/fwretract> -<src/feature/host_actions.cpp> -<src/feature/hotend_idle.cpp> -<src/feature/joystick.cpp> -<src/feature/leds/blinkm.cpp> -<src/feature/leds/leds.cpp> -<src/feature/leds/neopixel.cpp> -<src/feature/leds/pca9533.cpp> -<src/feature/leds/pca9632.cpp> -<src/feature/leds/printer_event_leds.cpp> -<src/feature/leds/tempstat.cpp> -<src/feature/max7219.cpp> -<src/feature/meatpack.cpp> -<src/feature/mixing.cpp> -<src/feature/mmu/mmu.cpp> -<src/feature/mmu/mmu2.cpp> -<src/gcode/feature/prusa_MMU2> -<src/feature/password> -<src/gcode/feature/password> -<src/feature/pause.cpp> -<src/feature/power.cpp> -<src/feature/power_monitor.cpp> -<src/gcode/feature/power_monitor> -<src/feature/powerloss.cpp> -<src/gcode/feature/powerloss> -<src/feature/probe_temp_comp.cpp> -<src/feature/repeat.cpp> -<src/feature/runout.cpp> -<src/gcode/feature/runout> -<src/feature/snmm.cpp> -<src/feature/solenoid.cpp> -<src/gcode/control/M380_M381.cpp> -<src/feature/spindle_laser.cpp> -<src/gcode/control/M3-M5.cpp> -<src/feature/stepper_driver_safety.cpp> -<src/feature/tmc_util.cpp> -<src/module/stepper/trinamic.cpp> -<src/feature/tramming.cpp> -<src/feature/twibus.cpp> -<src/feature/x_twist.cpp> -<src/gcode/probe/M423.cpp> -<src/feature/z_stepper_align.cpp> -<src/gcode/bedlevel/G26.cpp> -<src/gcode/bedlevel/G35.cpp> -<src/gcode/bedlevel/G42.cpp> -<src/gcode/bedlevel/M420.cpp> -<src/feature/bedlevel/bedlevel.cpp> -<src/gcode/calibrate/G33.cpp> -<src/gcode/calibrate/G34.cpp> -<src/gcode/calibrate/G34_M422.cpp> -<src/gcode/calibrate/G76_M871.cpp> -<src/gcode/calibrate/G425.cpp> -<src/gcode/calibrate/M12.cpp> -<src/gcode/calibrate/M48.cpp> -<src/gcode/calibrate/M100.cpp> -<src/gcode/calibrate/M425.cpp> -<src/gcode/calibrate/M665.cpp> -<src/gcode/calibrate/M666.cpp> -<src/gcode/calibrate/M852.cpp> -<src/gcode/control/M10-M11.cpp> -<src/gcode/control/M42.cpp> -<src/gcode/control/M226.cpp> -<src/gcode/config/M43.cpp> -<src/gcode/config/M217.cpp> -<src/gcode/config/M218.cpp> -<src/gcode/config/M221.cpp> -<src/gcode/config/M301.cpp> -<src/gcode/config/M302.cpp> -<src/gcode/config/M304.cpp> -<src/gcode/config/M305.cpp> -<src/gcode/config/M540.cpp> -<src/gcode/config/M575.cpp> -<src/gcode/config/M672.cpp> -<src/gcode/control/M7-M9.cpp> -<src/gcode/control/M211.cpp> -<src/gcode/control/M350_M351.cpp> -<src/gcode/control/M605.cpp> -<src/gcode/feature/advance> -<src/gcode/feature/camera> -<src/gcode/feature/i2c> -<src/gcode/feature/input_shaping> -<src/gcode/feature/L6470> -<src/gcode/feature/leds/M150.cpp> -<src/gcode/feature/leds/M7219.cpp> -<src/gcode/feature/macro> -<src/gcode/feature/mixing/M163-M165.cpp> -<src/gcode/feature/mixing/M166.cpp> -<src/gcode/feature/pause/G27.cpp> -<src/gcode/feature/pause/G60.cpp> -<src/gcode/feature/pause/G61.cpp> -<src/gcode/feature/pause/M125.cpp> -<src/gcode/feature/pause/M600.cpp> -<src/gcode/feature/pause/M603.cpp> -<src/gcode/feature/pause/M701_M702.cpp> -<src/gcode/feature/trinamic/M122.cpp> -<src/gcode/feature/trinamic/M569.cpp> -<src/gcode/feature/trinamic/M906.cpp> -<src/gcode/feature/trinamic/M911-M914.cpp> -<src/gcode/feature/trinamic/M919.cpp> -<src/gcode/geometry/G17-G19.cpp> -<src/gcode/geometry/G53-G59.cpp> -<src/gcode/geometry/M206_M428.cpp> -<src/gcode/host/M16.cpp> -<src/gcode/host/M113.cpp> -<src/gcode/host/M154.cpp> -<src/gcode/host/M360.cpp> -<src/gcode/host/M876.cpp> -<src/gcode/lcd/M0_M1.cpp> -<src/gcode/lcd/M73.cpp> -<src/gcode/lcd/M117.cpp> -<src/gcode/lcd/M250.cpp> -<src/gcode/lcd/M255.cpp> -<src/gcode/lcd/M256.cpp> -<src/gcode/lcd/M300.cpp> -<src/gcode/lcd/M414.cpp> -<src/gcode/lcd/M995.cpp> -<src/gcode/motion/G2_G3.cpp> -<src/gcode/motion/G5.cpp> -<src/gcode/motion/G80.cpp> -<src/gcode/motion/M290.cpp> -<src/gcode/probe/G30.cpp> -<src/gcode/probe/G31_G32.cpp> -<src/gcode/probe/G38.cpp> -<src/gcode/probe/M401_M402.cpp> -<src/gcode/probe/M851.cpp> -<src/gcode/probe/M951.cpp> -<src/gcode/scara> -<src/gcode/sd> -<src/gcode/sd/M32.cpp> -<src/gcode/sd/M808.cpp> -<src/gcode/temp/M104_M109.cpp> -<src/gcode/temp/M123.cpp> -<src/gcode/temp/M155.cpp> -<src/gcode/temp/M192.cpp> -<src/gcode/temp/M306.cpp> -<src/gcode/units/G20_G21.cpp> -<src/gcode/units/M82_M83.cpp> -<src/gcode/units/M149.cpp> -<src/libs/BL24CXX.cpp> -<src/libs/W25Qxx.cpp> -<src/libs/L64XX> -<src/module/stepper/L64xx.cpp> -<src/HAL/shared/HAL_spi_L6470.cpp> -<src/libs/MAX31865.cpp> -<src/libs/hex_print.cpp> -<src/libs/least_squares_fit.cpp> -<src/libs/nozzle.cpp> -<src/gcode/feature/clean> -<src/module/planner_bezier.cpp> -<src/module/polargraph.cpp> -<src/module/printcounter.cpp> -<src/module/probe.cpp> -<src/module/scara.cpp> -<src/module/servo.cpp> -<src/gcode/control/M280.cpp> -<src/gcode/config/M281.cpp> -<src/gcode/control/M282.cpp> -<src/module/stepper/TMC26X.cpp> # # Default values apply to all 'env:' prefixed environments # [env:ATmega1284P] platform = atmelavr board = ATmega1284P framework = arduino extra_scripts = ${common.extra_scripts} build_flags = ${common.build_flags} lib_deps = ${common.lib_deps} monitor_speed = 115200
-
retrazione a fine stampa non va
TOAD ha risposto a TOAD nella discussione Problemi generici o di qualità di stampa
grazie ho seguito entrambi i consigli ed ora funziona! ho inserito G92 E0 ed ho abbassato la retrazione a 100 mm e funziona grazie mille! -
retrazione a fine stampa non va
TOAD ha pubblicato una discussione in Problemi generici o di qualità di stampa
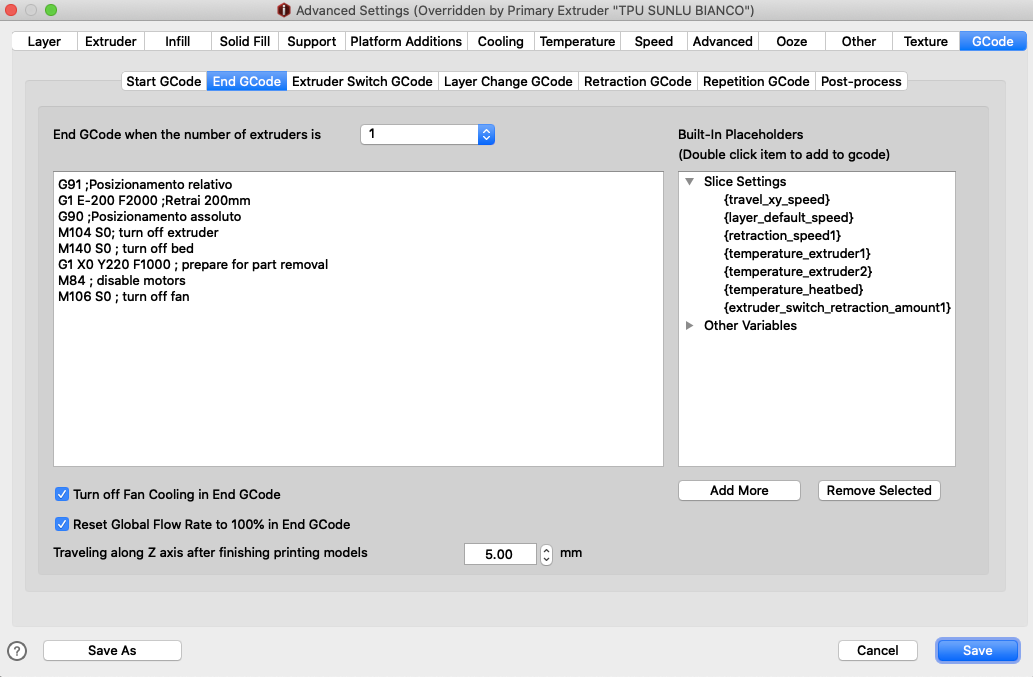
ciao a tutti, come avrete intuito dal titolo ho problemi a far retrarre il filo a fine stampa alla mia ender 3 pro. nella foto si vede l'end g code che ho impostato su ideamaker. non capisco proprio perché non funzioni, le altre righe dell'end g code vengono eseguite perché a fine stampa l'hotend si spegne ed il piatto scorre avanti qualcuno sa aiutarmi?
-
end GCODE per estrarre il filo a fine stampa
TOAD ha pubblicato una discussione in Problemi generici o di qualità di stampa
ciao a tutti, avrei la necessità che a fine stampa la stampante ritraesse il filo (20cm) in modo da poterlo togliere senza dover riaccendere la stampante e riscaldare l'ugello successivamente. credo basti aggiungere una riga al end GCODE ma non sono riuscito a capire cosa inserire. Utilizzo una Ender 3 Pro e Ideamaker attualmente utilizzo questo end GCODE: M104 S0; turn off extruder M140 S0 ; turn off bed G1 X0 Y220 F1000 ; prepare for part removal M84 ; disable motors M106 S0 ; turn off fan potete aiutarmi? grazie