

zis2104
-
Numero contenuti
68 -
Iscritto
-
Ultima visita
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Risposte pubblicato da zis2104
-
-
io scemo come sono ho preso il modello che ha lo stesso problema come quello anet a8
il modello è questo
https://it.aliexpress.com/i/1005001729266611.html
ho attivato la stringa del modello ma ancora niente
-
Praticamente mi si accende solo la luce della manopola e lo schermo resta nero, che stringhe devo attivare?
-
37 minuti fa, Killrob ha scritto:
in che senso e di quanto discorda?
https://www.thingiverse.com/thing:2829553
ho provato a stamparlo e mi usciva allargato ai lati che alla fine non sembrava più un uovo, poi ho provato a stampare un nuovo supporto per la ventolina, dimensione diversa
-
Da come ho visto le varie info in giro credo mi convenga avere una configurazione custom invece che basata su anet a8, quindi credo che cambierò lo schermo con uno touch invece che ammazzarmi nel configurare i vari pin per poi avere uno schermo economico. L'unica cosa è che devo stamparmi la custodia per lo schermo touch che voglio mettere, ma ogni volta che stampo qualcosa la dimensione è diversa da quella impostata, qualcuno sa come ovviare questo problema?All'anet non ho installato marlin
-
8 minuti fa, Eddy72 ha scritto:
Alcune info le trovi qui
ANet A8 Rewiring for SKR V1.3 or V1.4 – Caggius Interweb (wordpress.com)
Ciaoo
Grazie
-
28 minuti fa, Eddy72 ha scritto:
Ho provato a ricompilarlo da nuovo e mi da l'errore del 3,3v
Perchè c'è impostato il monitor della Anet che va a 5v e la porta sulla skr 1.3 va a 3,3v, dunque ti avvisa del problema
Che monitor monti?
Ciaoo
quello stock che monta l'anet a8, quello coi pulsanti a croce
allora non dava problemi solo a me quindi
-
credo di aver capito il problema, se il marlin lo prendo da qui https://github.com/MarlinFirmware/Marlin e non metto la configurazione dell'anet a8 e lo imposto la build va
qualcuno sa dove trovare la configurazione dell'anet a8 funzionante o se mi conviene configurarla custom?
-
1 ora fa, Killrob ha scritto:
sinceramente non l'ho provata, ho solo guardato i tuoi conf.h e _adv.h e non ci ho visto errori
Il fatto strano che ogni volta che faccio da capo la compilazione, riscaricando gli stessi pacchetti mi arrivano errori diversi, prima lo schermo lcd, poi mi dice che alcune stringhe contengono errori, poi mi dice qualcosa su una stringa che riguarda 3.3v...forse il mio pc ha dei problemi
-
40 minuti fa, Killrob ha scritto:
non vedo errori
ma da te riesce a fare la build senza fare errori?
-
potreste vedere dove ho sbagliato? sto uscendo pazzo
-
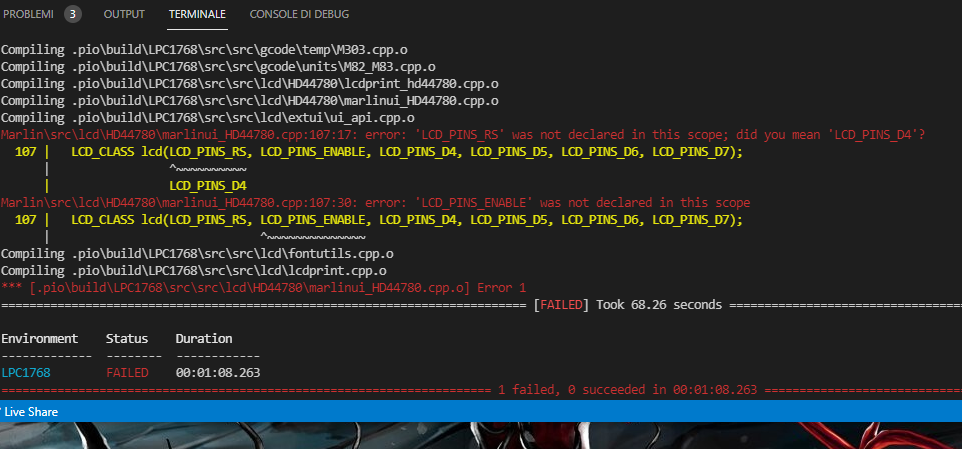
ma come vado avanti trovo sempre un problema, qui dice che non ho impostato lo schermo lcd, per quello predefinito dell'anet qual'è?

-
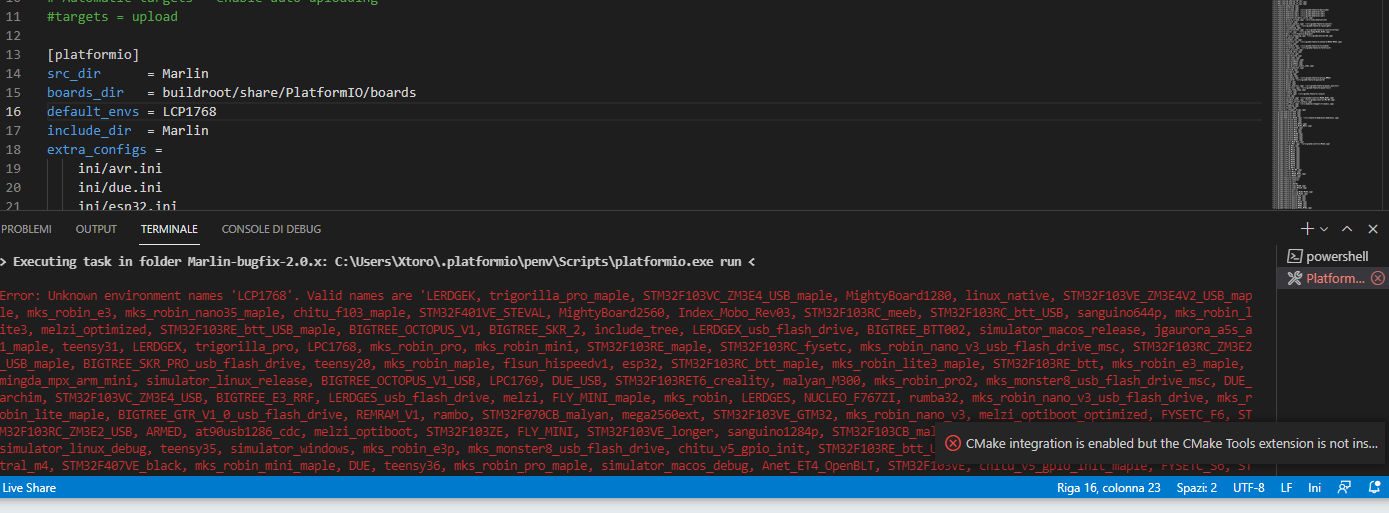
32 minuti fa, Truck64 ha scritto:
Guarda cosa hai scritto: LPC1768 e LCP1768 non è la stessa cosa
Mi pare che in tutti i tentativi che ho fatto ho fatto copia e in colla una volta e ancora non andava....domani è un altro giorno. Almeno sto imparando da una scheda pagata 25€ motori inclusi
-
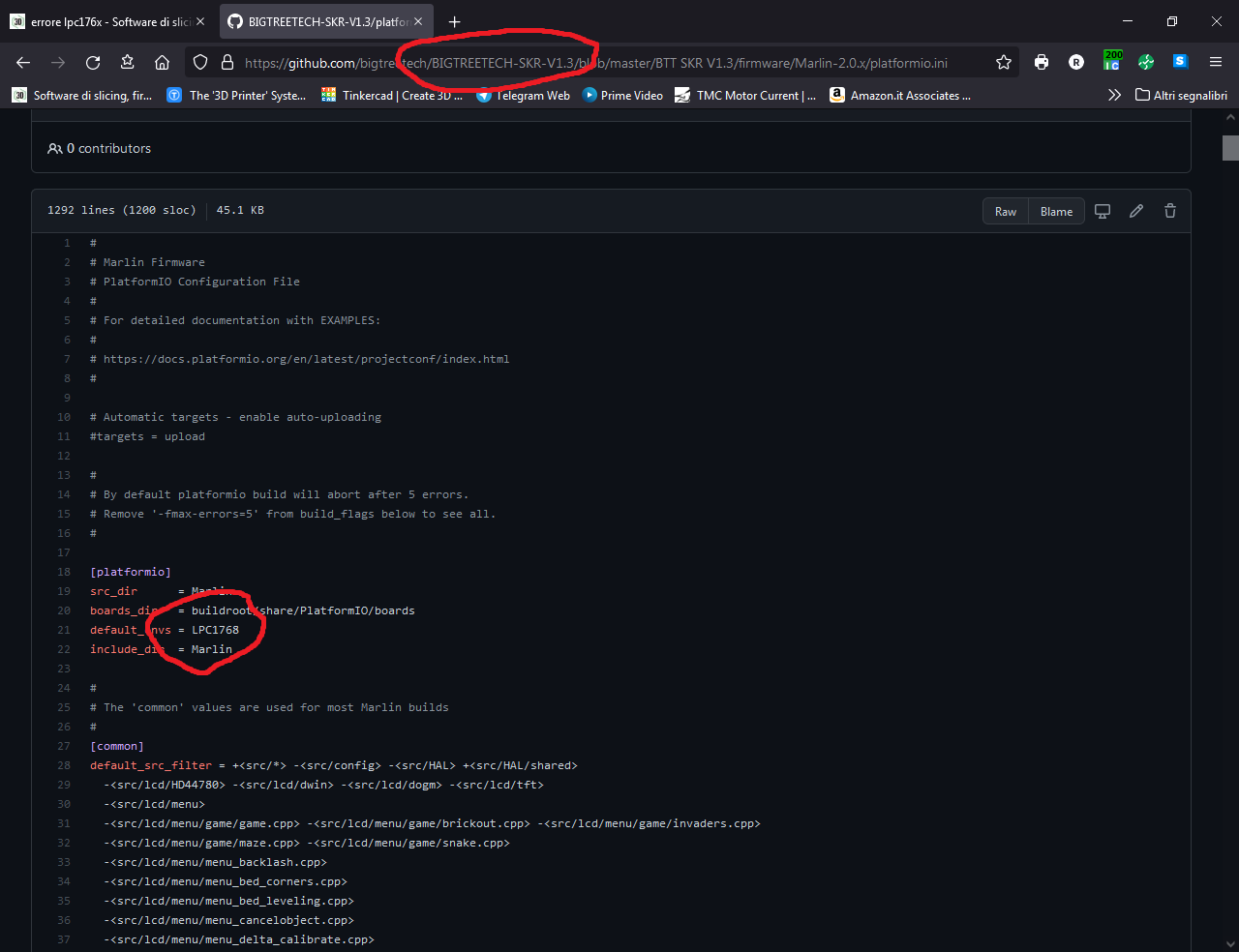
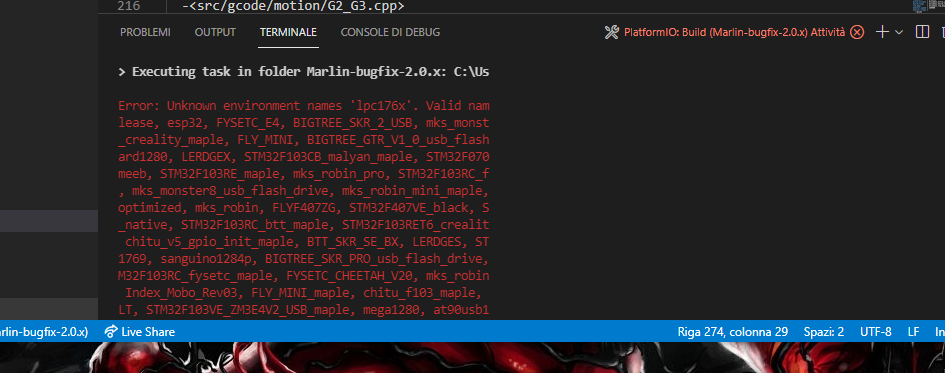
46 minuti fa, Killrob ha scritto:
@zis2104 scusa una cosa... sono andato direttamente sul github di BTT per vedere il platformio che hanno loro.... perché hai messo LPC176X quando quella cpu non esiste proprio?
guarda cosa mettono loro....

semplicemente perché LPC176X non è una cpu, la cpu valida per quella scheda è LPC1768
Ci hi provato ma dà lo stesso errore
-
// Choose the name from boards.h that matches your setup#ifndef MOTHERBOARD#define MOTHERBOARD BOARD_BTT_SKR_V1_3#endif// Name displayed in the LCD "Ready" message and Info menu#define CUSTOM_MACHINE_NAME "Anet A8"Use TMC2208/TMC2208_STANDALONE for TMC2225 drivers and TMC2209/TMC2209_STANDALONE for TMC2226 drivers.** Options: A4988, A5984, DRV8825, LV8729, L6470, L6474, POWERSTEP01,* TB6560, TB6600, TMC2100,* TMC2130, TMC2130_STANDALONE, TMC2160, TMC2160_STANDALONE,* TMC2208, TMC2208_STANDALONE, TMC2209, TMC2209_STANDALONE,* TMC26X, TMC26X_STANDALONE, TMC2660, TMC2660_STANDALONE,* TMC5130, TMC5130_STANDALONE, TMC5160, TMC5160_STANDALONE* :['A4988', 'A5984', 'DRV8825', 'LV8729', 'L6470', 'L6474', 'POWERSTEP01', 'TB6560', 'TB6600', 'TMC2100', 'TMC2130', 'TMC2130_STANDALONE', 'TMC2160', 'TMC2160_STANDALONE', 'TMC2208', 'TMC2208_STANDALONE', 'TMC2209', 'TMC2209_STANDALONE', 'TMC26X', 'TMC26X_STANDALONE', 'TMC2660', 'TMC2660_STANDALONE', 'TMC5130', 'TMC5130_STANDALONE', 'TMC5160', 'TMC5160_STANDALONE']*/#define X_DRIVER_TYPE TMC2208#define Y_DRIVER_TYPE TMC2208#define Z_DRIVER_TYPE TMC2208//#define X2_DRIVER_TYPE A4988//#define Y2_DRIVER_TYPE A4988//#define Z2_DRIVER_TYPE A4988//#define Z3_DRIVER_TYPE A4988//#define Z4_DRIVER_TYPE A4988//#define I_DRIVER_TYPE A4988//#define J_DRIVER_TYPE A4988//#define K_DRIVER_TYPE A4988#define E0_DRIVER_TYPE TMC2208//#define E1_DRIVER_TYPE A4988//#define E2_DRIVER_TYPE A4988//#define E3_DRIVER_TYPE A4988//#define E4_DRIVER_TYPE A4988//#define E5_DRIVER_TYPE A4988//#define E6_DRIVER_TYPE A4988//#define E7_DRIVER_TYPE A4988#pragma once#define CONFIG_EXAMPLES_DIR "Anet/A8"/*** Configuration_adv.h** Advanced settings.* Only change these if you know exactly what you're doing.* Some of these settings can damage your printer if improperly set!** Basic settings can be found in Configuration.h*/#define CONFIGURATION_ADV_H_VERSION 02000901* Interpolate microsteps to 256* Override for each driver with <driver>_INTERPOLATE settings below*/#define INTERPOLATE true#if AXIS_IS_TMC(X)#define X_CURRENT 660 // (mA) RMS current. Multiply by 1.414 for peak current.#define X_CURRENT_HOME X_CURRENT // (mA) RMS current for sensorless homing#define X_MICROSTEPS 16 // 0..256#define X_RSENSE 0.11#define X_CHAIN_POS -1 // -1..0: Not chained. 1: MCU MOSI connected. 2: Next in chain, ...//#define X_INTERPOLATE true // Enable to override 'INTERPOLATE' for the X axis#endif#if AXIS_IS_TMC(Y)#define Y_CURRENT 660#define Y_CURRENT_HOME Y_CURRENT#define Y_MICROSTEPS 16#define Y_RSENSE 0.11#define Y_CHAIN_POS -1//#define Y_INTERPOLATE true#endif#if AXIS_IS_TMC(Z)#define Z_CURRENT 800#define Z_CURRENT_HOME Z_CURRENT#define Z_MICROSTEPS 16#define Z_RSENSE 0.11#define Z_CHAIN_POS -1//#define Z_INTERPOLATE true#endif#if AXIS_IS_TMC(E0)#define E0_CURRENT 800#define E0_MICROSTEPS 16#define E0_RSENSE 0.11#define E0_CHAIN_POS -1//#define E0_INTERPOLATE true#endif[platformio]src_dir = Marlinboards_dir = buildroot/share/PlatformIO/boardsdefault_envs = lpc176xinclude_dir = Marlinextra_configs =ini/avr.iniini/due.iniini/esp32.iniini/features.iniini/lpc176x.iniini/native.iniini/samd51.iniini/stm32-common.iniini/stm32f0.iniini/stm32f1-maple.iniini/stm32f1.iniini/stm32f4.iniini/stm32f7.iniini/stm32h7.iniini/teensy.ini## The 'common' section applies to most Marlin builds.## By default platformio build will abort after 5 errors.# Remove '-fmax-errors=5' from build_flags below to see all.#[common]build_flags = -g3 -D__MARLIN_FIRMWARE__ -DNDEBUG-fmax-errors=5extra_scripts =pre:buildroot/share/PlatformIO/scripts/common-dependencies.pypre:buildroot/share/PlatformIO/scripts/common-cxxflags.pypre:buildroot/share/PlatformIO/scripts/preflight-checks.pypost:buildroot/share/PlatformIO/scripts/common-dependencies-post.pylib_deps =default_src_filter = +<src/*> -<src/config> -<src/HAL> +<src/HAL/shared>-<src/lcd/HD44780> -<src/lcd/TFTGLCD> -<src/lcd/dogm> -<src/lcd/tft> -<src/lcd/tft_io>-<src/HAL/STM32/tft> -<src/HAL/STM32F1/tft>-<src/lcd/e3v2/creality> -<src/lcd/e3v2/enhanced> -<src/lcd/e3v2/jyersui> -<src/lcd/e3v2/marlinui>-<src/lcd/menu>-<src/lcd/menu/game/game.cpp> -<src/lcd/menu/game/brickout.cpp> -<src/lcd/menu/game/invaders.cpp>-<src/lcd/menu/game/maze.cpp> -<src/lcd/menu/game/snake.cpp>-<src/lcd/menu/menu_backlash.cpp>-<src/lcd/menu/menu_bed_corners.cpp>-<src/lcd/menu/menu_bed_leveling.cpp>-<src/lcd/menu/menu_cancelobject.cpp>-<src/lcd/menu/menu_delta_calibrate.cpp>-<src/lcd/menu/menu_filament.cpp>-<src/lcd/menu/menu_info.cpp>-<src/lcd/menu/menu_job_recovery.cpp>-<src/lcd/menu/menu_language.cpp>-<src/lcd/menu/menu_led.cpp>-<src/lcd/menu/menu_media.cpp>-<src/lcd/menu/menu_mmu2.cpp>-<src/lcd/menu/menu_password.cpp>-<src/lcd/menu/menu_power_monitor.cpp>-<src/lcd/menu/menu_spindle_laser.cpp>-<src/lcd/menu/menu_temperature.cpp>-<src/lcd/menu/menu_tmc.cpp>-<src/lcd/menu/menu_touch_screen.cpp>-<src/lcd/menu/menu_tramming.cpp>-<src/lcd/menu/menu_ubl.cpp>-<src/lcd/extui/anycubic_chiron>-<src/lcd/extui/anycubic_i3mega>-<src/lcd/extui/dgus> -<src/lcd/extui/dgus/fysetc> -<src/lcd/extui/dgus/hiprecy> -<src/lcd/extui/dgus/mks> -<src/lcd/extui/dgus/origin>-<src/lcd/extui/dgus_reloaded>-<src/lcd/extui/example>-<src/lcd/extui/ftdi_eve_touch_ui>-<src/lcd/extui/malyan>-<src/lcd/extui/mks_ui>-<src/lcd/extui/nextion>-<src/lcd/lcdprint.cpp>-<src/lcd/touch/touch_buttons.cpp>-<src/sd/usb_flashdrive/lib-uhs2> -<src/sd/usb_flashdrive/lib-uhs3>-<src/sd/usb_flashdrive/Sd2Card_FlashDrive.cpp>-<src/sd/cardreader.cpp> -<src/sd/Sd2Card.cpp> -<src/sd/SdBaseFile.cpp> -<src/sd/SdFatUtil.cpp> -<src/sd/SdFile.cpp> -<src/sd/SdVolume.cpp> -<src/gcode/sd>-<src/HAL/shared/backtrace>-<src/HAL/shared/cpu_exception>-<src/HAL/shared/eeprom_if_i2c.cpp>-<src/HAL/shared/eeprom_if_spi.cpp>-<src/feature/babystep.cpp>-<src/feature/backlash.cpp>-<src/feature/baricuda.cpp> -<src/gcode/feature/baricuda>-<src/feature/bedlevel/abl> -<src/gcode/bedlevel/abl>-<src/feature/bedlevel/mbl> -<src/gcode/bedlevel/mbl>-<src/feature/bedlevel/ubl> -<src/gcode/bedlevel/ubl>-<src/feature/bedlevel/hilbert_curve.cpp>-<src/feature/binary_stream.cpp> -<src/libs/heatshrink>-<src/feature/bltouch.cpp>-<src/feature/cancel_object.cpp> -<src/gcode/feature/cancel>-<src/feature/caselight.cpp> -<src/gcode/feature/caselight>-<src/feature/closedloop.cpp>-<src/feature/controllerfan.cpp> -<src/gcode/feature/controllerfan>-<src/feature/cooler.cpp> -<src/gcode/temp/M143_M193.cpp>-<src/feature/dac> -<src/feature/digipot>-<src/feature/direct_stepping.cpp> -<src/gcode/motion/G6.cpp>-<src/feature/e_parser.cpp>-<src/feature/encoder_i2c.cpp>-<src/feature/ethernet.cpp> -<src/gcode/feature/network/M552-M554.cpp>-<src/feature/fanmux.cpp>-<src/feature/filwidth.cpp> -<src/gcode/feature/filwidth>-<src/feature/fwretract.cpp> -<src/gcode/feature/fwretract>-<src/feature/host_actions.cpp>-<src/feature/hotend_idle.cpp>-<src/feature/joystick.cpp>-<src/feature/leds/blinkm.cpp>-<src/feature/leds/leds.cpp>-<src/feature/leds/neopixel.cpp>-<src/feature/leds/pca9533.cpp>-<src/feature/leds/pca9632.cpp>-<src/feature/leds/printer_event_leds.cpp>-<src/feature/leds/tempstat.cpp>-<src/feature/max7219.cpp>-<src/feature/meatpack.cpp>-<src/feature/mixing.cpp>-<src/feature/mmu/mmu.cpp>-<src/feature/mmu/mmu2.cpp> -<src/gcode/feature/prusa_MMU2>-<src/feature/password> -<src/gcode/feature/password>-<src/feature/pause.cpp>-<src/feature/power.cpp>-<src/feature/power_monitor.cpp> -<src/gcode/feature/power_monitor>-<src/feature/powerloss.cpp> -<src/gcode/feature/powerloss>-<src/feature/probe_temp_comp.cpp>-<src/feature/repeat.cpp>-<src/feature/runout.cpp> -<src/gcode/feature/runout>-<src/feature/snmm.cpp>-<src/feature/solenoid.cpp> -<src/gcode/control/M380_M381.cpp>-<src/feature/spindle_laser.cpp> -<src/gcode/control/M3-M5.cpp>-<src/feature/stepper_driver_safety.cpp>-<src/feature/tmc_util.cpp> -<src/module/stepper/trinamic.cpp>-<src/feature/tramming.cpp>-<src/feature/twibus.cpp>-<src/feature/z_stepper_align.cpp>-<src/gcode/bedlevel/G26.cpp>-<src/gcode/bedlevel/G35.cpp>-<src/gcode/bedlevel/G42.cpp>-<src/gcode/bedlevel/M420.cpp> -<src/feature/bedlevel/bedlevel.cpp>-<src/gcode/calibrate/G33.cpp>-<src/gcode/calibrate/G34.cpp>-<src/gcode/calibrate/G34_M422.cpp>-<src/gcode/calibrate/G76_M192_M871.cpp>-<src/gcode/calibrate/G425.cpp>-<src/gcode/calibrate/M12.cpp>-<src/gcode/calibrate/M48.cpp>-<src/gcode/calibrate/M100.cpp>-<src/gcode/calibrate/M425.cpp>-<src/gcode/calibrate/M666.cpp>-<src/gcode/calibrate/M852.cpp>-<src/gcode/control/M10-M11.cpp>-<src/gcode/control/M42.cpp> -<src/gcode/control/M226.cpp>-<src/gcode/config/M43.cpp>-<src/gcode/config/M217.cpp>-<src/gcode/config/M218.cpp>-<src/gcode/config/M221.cpp>-<src/gcode/config/M281.cpp>-<src/gcode/config/M301.cpp>-<src/gcode/config/M302.cpp>-<src/gcode/config/M304.cpp>-<src/gcode/config/M305.cpp>-<src/gcode/config/M540.cpp>-<src/gcode/config/M575.cpp>-<src/gcode/config/M672.cpp>-<src/gcode/control/M7-M9.cpp>-<src/gcode/control/M211.cpp>-<src/gcode/control/M350_M351.cpp>-<src/gcode/control/M605.cpp>-<src/gcode/feature/advance>-<src/gcode/feature/camera>-<src/gcode/feature/i2c>-<src/gcode/feature/L6470>-<src/gcode/feature/leds/M150.cpp>-<src/gcode/feature/leds/M7219.cpp>-<src/gcode/feature/macro>-<src/gcode/feature/mixing/M163-M165.cpp>-<src/gcode/feature/mixing/M166.cpp>-<src/gcode/feature/pause/G27.cpp>-<src/gcode/feature/pause/G60.cpp>-<src/gcode/feature/pause/G61.cpp>-<src/gcode/feature/pause/M125.cpp>-<src/gcode/feature/pause/M600.cpp>-<src/gcode/feature/pause/M603.cpp>-<src/gcode/feature/pause/M701_M702.cpp>-<src/gcode/feature/trinamic/M122.cpp>-<src/gcode/feature/trinamic/M569.cpp>-<src/gcode/feature/trinamic/M906.cpp>-<src/gcode/feature/trinamic/M911-M914.cpp>-<src/gcode/geometry/G17-G19.cpp>-<src/gcode/geometry/G53-G59.cpp>-<src/gcode/geometry/M206_M428.cpp>-<src/gcode/host/M16.cpp>-<src/gcode/host/M113.cpp>-<src/gcode/host/M154.cpp>-<src/gcode/host/M360.cpp>-<src/gcode/host/M876.cpp>-<src/gcode/lcd/M0_M1.cpp>-<src/gcode/lcd/M117.cpp>-<src/gcode/lcd/M250.cpp> -<src/gcode/lcd/M256.cpp>-<src/gcode/lcd/M300.cpp>-<src/gcode/lcd/M414.cpp>-<src/gcode/lcd/M73.cpp>-<src/gcode/lcd/M995.cpp>-<src/gcode/motion/G2_G3.cpp>-<src/gcode/motion/G5.cpp>-<src/gcode/motion/G80.cpp>-<src/gcode/motion/M290.cpp>-<src/gcode/probe/G30.cpp>-<src/gcode/probe/G31_G32.cpp>-<src/gcode/probe/G38.cpp>-<src/gcode/probe/M401_M402.cpp>-<src/gcode/probe/M851.cpp>-<src/gcode/probe/M951.cpp>-<src/gcode/scara>-<src/gcode/sd>-<src/gcode/sd/M32.cpp>-<src/gcode/sd/M808.cpp>-<src/gcode/temp/M104_M109.cpp>-<src/gcode/temp/M155.cpp>-<src/gcode/units/G20_G21.cpp>-<src/gcode/units/M82_M83.cpp>-<src/gcode/units/M149.cpp>-<src/libs/BL24CXX.cpp> -<src/libs/W25Qxx.cpp>-<src/libs/L64XX> -<src/module/stepper/L64xx.cpp> -<src/HAL/shared/HAL_spi_L6470.cpp>-<src/libs/MAX31865.cpp>-<src/libs/hex_print.cpp>-<src/libs/least_squares_fit.cpp>-<src/libs/nozzle.cpp> -<src/gcode/feature/clean>-<src/module/delta.cpp>-<src/module/planner_bezier.cpp>-<src/module/printcounter.cpp>-<src/module/probe.cpp>-<src/module/scara.cpp> -<src/gcode/calibrate/M665.cpp>-<src/module/servo.cpp> -<src/gcode/control/M280.cpp>-<src/module/stepper/TMC26X.cpp>## Default values apply to all 'env:' prefixed environments#[env]framework = arduinoextra_scripts = ${common.extra_scripts}build_flags = ${common.build_flags}lib_deps = ${common.lib_deps}monitor_speed = 250000monitor_flags =--quiet--echo--eolLF--filtercolorize--filtertime## Just print the dependency tree#[env:include_tree]platform = atmelavrboard = megaatmega2560build_flags = -c -H -std=gnu++11 -Wall -Os -D__MARLIN_FIRMWARE__src_filter = +<src/MarlinCore.cpp>dove avrei dimenticato?
-
31 minuti fa, Truck64 ha scritto:
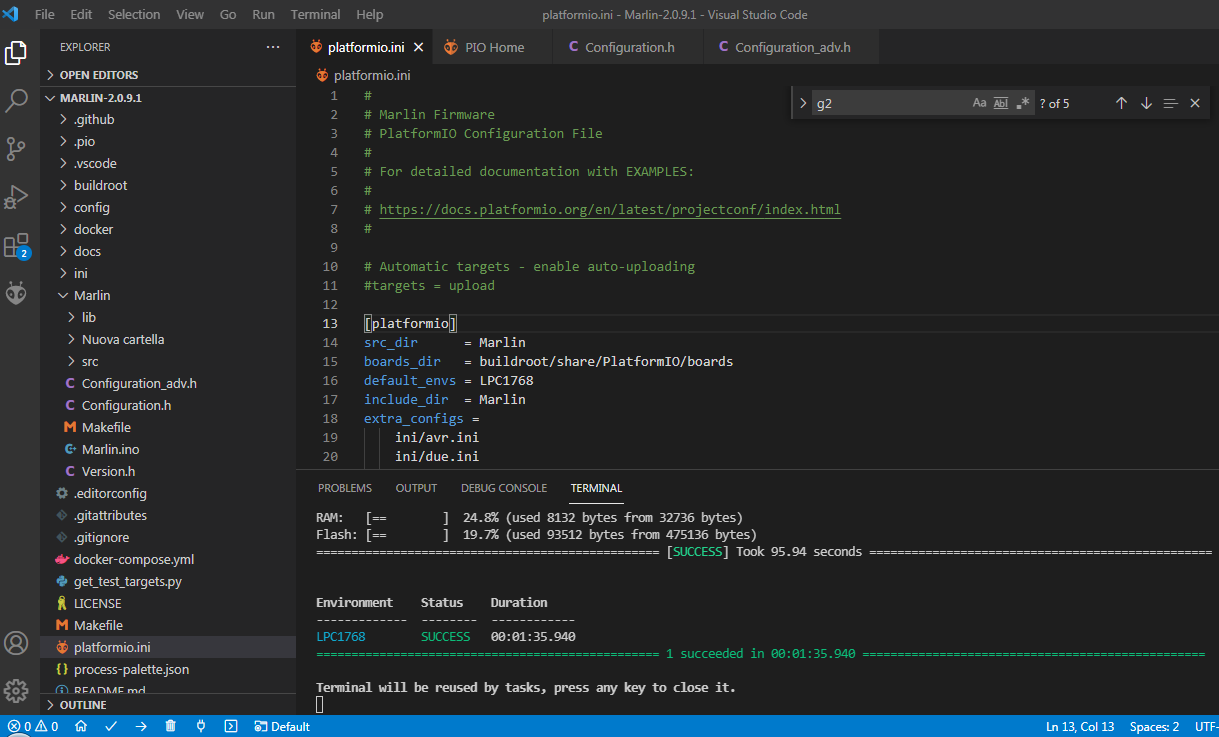
Veramennte con i file di configurazione di esempio della SBASE compila regolare:
Difficile darti una risposta se non ci dai più informazioni.
Stasera mi metto di nuovo a riscrivere il firmware, se non va metto il mio progetto su mega e vedete se a voi vi fa compilare, perché la cosa strana che ho seguito tutti i passaggi alla lettera e l'unica cosa che a mio parere protrebbe essere il problema è visualstudio o platform io
-
Avevo scritto le informazioni sulla motherboard e gli altri, ma ho notato che quando devo specificare il processore lpc1768 o lpc176x fa sempre questo errore. Poi cmake da errore
-
non riesco a creare il firmware
-
2 ore fa, Killrob ha scritto:
Aspetta che non ho capito ricomincia
Ok io ho 2 motori z nell'anet a8, e in nella motherboard anet a8 c'erano 2 prese per z1 e z2, ora nella scheda skr 1.3 per collegare i 2 motori z(dato che c'è solo una presa per un motore z) devo mettere uno sdoppiatore per collegare i 2 motori alla stessa presa. Ora la mia domanda era che dato che i cavi sono collegati nello stesso posto mi chiedevo se dovevo impostare nel firmware solo lo z1 oppure devo abilitare anche lo z2. Ecco quello che ho preso
Moduli paralleli di motori passo-passo a passo a doppia Z con 100 mm cavo per stampante 3D accessori https://www.amazon.it/dp/B098QMQ55W/ref=cm_sw_r_cp_apan_glt_i_ZB9XTKE0WRMAMGZ5GKBX?_encoding=UTF8&psc=1
-
2 ore fa, Killrob ha scritto:
Z2 lo attivi solo se hai un motore collegato altrimenti a che ti serve?
Perché pensavo che dato che devo mettere alla porta del motore z lo sdoppiatore per collegare i 2 motori pensavo che regolavo tutto dallo z1.
-
1 ora fa, Killrob ha scritto:
per il momento lasciale così, se senti che i motori scaldano o perde passi abbassi (nel primo caso) o alzi (nel secondo caso)
Ma ho fatto bene a non attivare z2?dato che sto utilizzando uno sdoppiare?
-
stavo compilando il firmware arrivando ai driver passo passo mi sono trovato queste stringhe precompilate dato che ho usato il profile dell'anet a8 già presente, ora mi chiedevo se posso lasciare invariato queste stringhe dato che ho già specificato il nome dei driver. Ovviamente sto personalizzando anche le temperature min e max dell'estrusore e del bed, il nome della motherboard.
* To use TMC2208 stepper UART-configurable stepper drivers connect #_SERIAL_TX_PIN* to the driver side PDN_UART pin with a 1K resistor.* To use the reading capabilities, also connect #_SERIAL_RX_PIN to PDN_UART without* a resistor.* The drivers can also be used with hardware serial.** TMCStepper library is required to use TMC stepper drivers.* https://github.com/teemuatlut/TMCStepper*/#if HAS_TRINAMIC_CONFIG#define HOLD_MULTIPLIER 0.5 // Scales down the holding current from run current/*** Interpolate microsteps to 256* Override for each driver with <driver>_INTERPOLATE settings below*/#define INTERPOLATE true#if AXIS_IS_TMC(X)#define X_CURRENT 800 // (mA) RMS current. Multiply by 1.414 for peak current.#define X_CURRENT_HOME X_CURRENT // (mA) RMS current for sensorless homing#define X_MICROSTEPS 16 // 0..256#define X_RSENSE 0.11#define X_CHAIN_POS -1 // -1..0: Not chained. 1: MCU MOSI connected. 2: Next in chain, ...//#define X_INTERPOLATE true // Enable to override 'INTERPOLATE' for the X axis#endif#if AXIS_IS_TMC(X2)#define X2_CURRENT 800#define X2_CURRENT_HOME X2_CURRENT#define X2_MICROSTEPS X_MICROSTEPS#define X2_RSENSE 0.11#define X2_CHAIN_POS -1//#define X2_INTERPOLATE true#endif#if AXIS_IS_TMC(Y)#define Y_CURRENT 800#define Y_CURRENT_HOME Y_CURRENT#define Y_MICROSTEPS 16#define Y_RSENSE 0.11#define Y_CHAIN_POS -1//#define Y_INTERPOLATE true#endif#if AXIS_IS_TMC(Y2)#define Y2_CURRENT 800#define Y2_CURRENT_HOME Y2_CURRENT#define Y2_MICROSTEPS Y_MICROSTEPS#define Y2_RSENSE 0.11#define Y2_CHAIN_POS -1//#define Y2_INTERPOLATE true#endif#if AXIS_IS_TMC(Z)#define Z_CURRENT 800#define Z_CURRENT_HOME Z_CURRENT#define Z_MICROSTEPS 16#define Z_RSENSE 0.11#define Z_CHAIN_POS -1//#define Z_INTERPOLATE true#endif#if AXIS_IS_TMC(Z2)#define Z2_CURRENT 800#define Z2_CURRENT_HOME Z2_CURRENT#define Z2_MICROSTEPS Z_MICROSTEPS#define Z2_RSENSE 0.11#define Z2_CHAIN_POS -1//#define Z2_INTERPOLATE true#endif#if AXIS_IS_TMC(Z3)#define Z3_CURRENT 800#define Z3_CURRENT_HOME Z3_CURRENT#define Z3_MICROSTEPS Z_MICROSTEPS#define Z3_RSENSE 0.11#define Z3_CHAIN_POS -1//#define Z3_INTERPOLATE true#endif#if AXIS_IS_TMC(Z4)#define Z4_CURRENT 800#define Z4_CURRENT_HOME Z4_CURRENT#define Z4_MICROSTEPS Z_MICROSTEPS#define Z4_RSENSE 0.11#define Z4_CHAIN_POS -1//#define Z4_INTERPOLATE true#endif#if AXIS_IS_TMC(I)#define I_CURRENT 800#define I_CURRENT_HOME I_CURRENT#define I_MICROSTEPS 16#define I_RSENSE 0.11#define I_CHAIN_POS -1//#define I_INTERPOLATE true#endif#if AXIS_IS_TMC(J)#define J_CURRENT 800#define J_CURRENT_HOME J_CURRENT#define J_MICROSTEPS 16#define J_RSENSE 0.11#define J_CHAIN_POS -1//#define J_INTERPOLATE true#endif#if AXIS_IS_TMC(K)#define K_CURRENT 800#define K_CURRENT_HOME K_CURRENT#define K_MICROSTEPS 16#define K_RSENSE 0.11#define K_CHAIN_POS -1//#define K_INTERPOLATE true#endif#if AXIS_IS_TMC(E0)#define E0_CURRENT 800#define E0_MICROSTEPS 16#define E0_RSENSE 0.11#define E0_CHAIN_POS -1//#define E0_INTERPOLATE true#endif#define X_DRIVER_TYPE TMC2208#define Y_DRIVER_TYPE TMC2208#define Z_DRIVER_TYPE TMC2208//#define X2_DRIVER_TYPE A4988//#define Y2_DRIVER_TYPE A4988//#define Z2_DRIVER_TYPE TMC2208//#define Z3_DRIVER_TYPE A4988//#define Z4_DRIVER_TYPE A4988//#define I_DRIVER_TYPE A4988//#define J_DRIVER_TYPE A4988//#define K_DRIVER_TYPE A4988#define E0_DRIVER_TYPE TMC2208//#define E1_DRIVER_TYPE A4988//#define E2_DRIVER_TYPE A4988//#define E3_DRIVER_TYPE A4988//#define E4_DRIVER_TYPE A4988//#define E5_DRIVER_TYPE A4988//#define E6_DRIVER_TYPE A4988//#define E7_DRIVER_TYPE A4988 -
4 ore fa, Killrob ha scritto:
3 motori su Z lo sconsigliano un po tutti, meglio solo 2 e una cinghia chiusa per sincronizzarli
Ma per il cubo non è meglio se sono 3 ? Ho visto un video su youtube che con più motori z con apposito bl touch si auto livella. Tipo cosi
Non credo sia da sottovalutare
-
32 minuti fa, Killrob ha scritto:
io ne ho 4 di stampanti 3D e 2 incisori laser. Solo una stampante, la Ender 3, l'ho comperata le altre le ho fatte da solo, ed in più ho tutti i pezzi di ricambio per tutte, e vieni a parlare a me di soldi spesi? 🤣
il bello deve essere anche quello, avere dei problemi e riuscire ad affrontarli capirli e superarli, che è l'unico modo per poi arrivare ad avere risultati e stampanti che non falliscono mai. Soprattutto queste cinesi.
Anche io prima o poi vorrei assemblare una da zero, in particolare vorrei fare il cubo con 3 motori z, piatto da 300mm, doppio estrusore e che sia soprattutto chiusa, sto già facendo la lista e un progetto, ma sarà cmq uno di quelli che lo completi in qualche mese, devo studiarmi bene la programmazione e tutto il procedimento
-
 1
1
-
-
51 minuti fa, marco mancini ha scritto:
con tutti i soldi che ho speso credo che la facevo nuova e ha 6 mesi di vita
Io ho preso una anet a8 da 80 € da gearbest, non era ok, ci ho dovuto spendere 50€ e ora va, devo solo installare marlin e in caso mettere la scheda madre skr, se mi arrivano in tempo i cavi per il doppio z. Il Punto è che le stampanti 3d sono fatte per essere modificate, tranne quelle super costose chiuse. Se poi vuoi veramente farla appezzi vedi se qualcuno del forum è interessato a comprare i pezzi o intera.
-
1
-
Skr 1.3 e BigTreeTech Mini12864 V1.0
in Hardware e componenti
Inviato
non appare in controluce
forse attivare la stringa non è quella giusta