

monux
-
Numero contenuti
28 -
Iscritto
-
Ultima visita
-
Giorni Vinti
1
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Tutti i contenuti di monux
-
CONSIGLIO UGELLO PER ANYCUBIC I3 MEGA-S
monux ha risposto a A203DLUCO nella discussione Hardware e componenti
anche quelli in rame placato nikel -
Comparativa ugelli cinesi Help3D
monux ha risposto a invernomuto nella discussione Hardware e componenti
come tutti i suoi articoli/video -
Trigorilla 0.0.2(Ramps 1.4) su anycubic Mega i3
monux ha risposto a Arsk98 nella discussione Hardware e componenti
fa una prova rapida caricando il firmware ufficiale anycubic. ovviamente ricordati che avrai i motori che gireranno in senso inverso se non tocchi i connettori. e poi dopo, se tutto funziona (al contrario ovviamente) carichi il fw di David Ramiro settato ad hoc per la i3 mega. altrimenti carica direttamente il Ramiro e basta PS: il Ramiro funziona senza modifiche su trigorilla NON 1.1 -
ho capito, grazie.
-
scusate la domanda ma....dato che vorrei realizzare una seconda stampante (la prima l'ho acquistata) mi sto guardando intorno. mi interessa molto il genere core xy ma, complice anche un libro sulle delta, mi è venuto il dubbio, o meglio curiosità su queste macchine. guardando un po' ovunque non ho trovato kit ma solo qualche "telaietto", un solo in realtà, alcuni componetnti per effettuare upgrade ma nulla di più. qualcuno ha qualche suggerimento? vorrei valutare i costi per realizzare una delta con area di stampa oltre i 20 cm (24; 27) di base ed almeno una 30-35cm in altezza.
-
a me sembra che i tuoi valori coincidano esattamente con le indicazioni della watterot.
-
Motori 0.9 con albero pieno e non tagliato a "D"
monux ha risposto a invernomuto nella discussione Hardware e componenti
in un video di un ragazzo che costruisce stampanti di grandi e grandissime dimensioni diceva di usarli tranquillamente e, data la longevità dei motor,i tanto vale incollarla la puleggia 😅 -
fantastici i tmc 🤣 sembrano la soluzione ai problemi essenziali della vita.....sarcasmo parte è chiaro che la vref dei tmc in generale sia una delle cose più chiacchierate della stampa 3d ma per orientarsi nella marea di guide più o meno teoriche e/o corrette credo sia necessario individuare le info che le aziende del settore forniscono proprio a proposito di questi driver. innanzitutto watterott dalla sua sezione faq - ne definisce i limiti di corrente: "...but the TMC21xx/TMC2208 SilentStepSticks can only be used up to 1.2A RMS." - dice di trovarlo empiricamente "Do not set the drivers to the maximum rated current of the respective stepper motor. A good point to start is half of the rated current and if there are problems (like step losses) then set a higher current in 0.1A steps till everythings works." ps: parla di Ampere e non di vref perchè poco prima della parte che ho estratto dice chiaramente che la regolazione dei tmc andrebbe fatta in corrente e non in tensione. - ne definisce i limiti termici: "TMC21x0/TMC2208: A small heat sink placed on the top PCB side is suitable for currents up to 850mA RMS. For higher currents use a cooling fan and a heat sink that nearly fills the top PCB side" nella pagina c'é anche un calcolatore di vref in funzione della corrente e se andiamo ad inserire 850mA (condizione max senza ventilazione forzata) il risultato sarà una Vref di 1,2 Volt.....e già da questo si capisce che molti video, con teorie aleatorie.......lasciamo perdere!! è una pagina piena zeppa di info utili sulla famiglia tmc, un'altra ad esempio: "If the motor is running/moving, then it is not allowed to switch off the power supply. Always make sure that the motor stands still and the motor outputs are deativated on shutting down, otherwise the driver IC can get damaged (because of back EMF)." la stessa watterott dice chiaramente di non usarli sugli estrusori "For most cases (except a direct-driven or bowden extruder of a 3D printer) the nearly silent stealthChop mode is suitable.If you have problems like step losses then you can use a slower acceleration or a bit higher current setting in stealthChop or you can use the more powerful and louder spreadCycle mode." ed in questa indicazione rimanda ad un video della trinamic in cui mostrano che il mondo è bello e silenzioso se si va piano e si accelera anche meno! 🤣 per farli funzionare hanno ridotto l'accelerazione da 3000 a 100 🤪 vabbè dai, la smetto......la pagina è linkata e secondo me è utile. anche la e3d ha la sua paginetta dozuki con spiegazione di come regolarli ma al momento di spiegare da quali valori partire mischia Vref ed Ampere....dice di aumentare la Vref a frazioni di 0,1A 😅 https://e3d-online.dozuki.com/Guide/VREF+adjustment+TMC/97?lang=en
-
in giro si trova una guida per far dialogare in spi i tmc2130 con la trigorilla. https://cdn.thingiverse.com/assets/b6/a9/0d/2d/d1/tmc2130_on_Anycubic_kossel_trigorilla.pdf la trigorilla ad 8bit, il classico mega2560 (ma anche l'arduino due) , ha quattro seriali, di cui uno condiviso con l'usb. resterebbero a disposizione solo tre seriali...su cui attaccare al max tre driver.
-
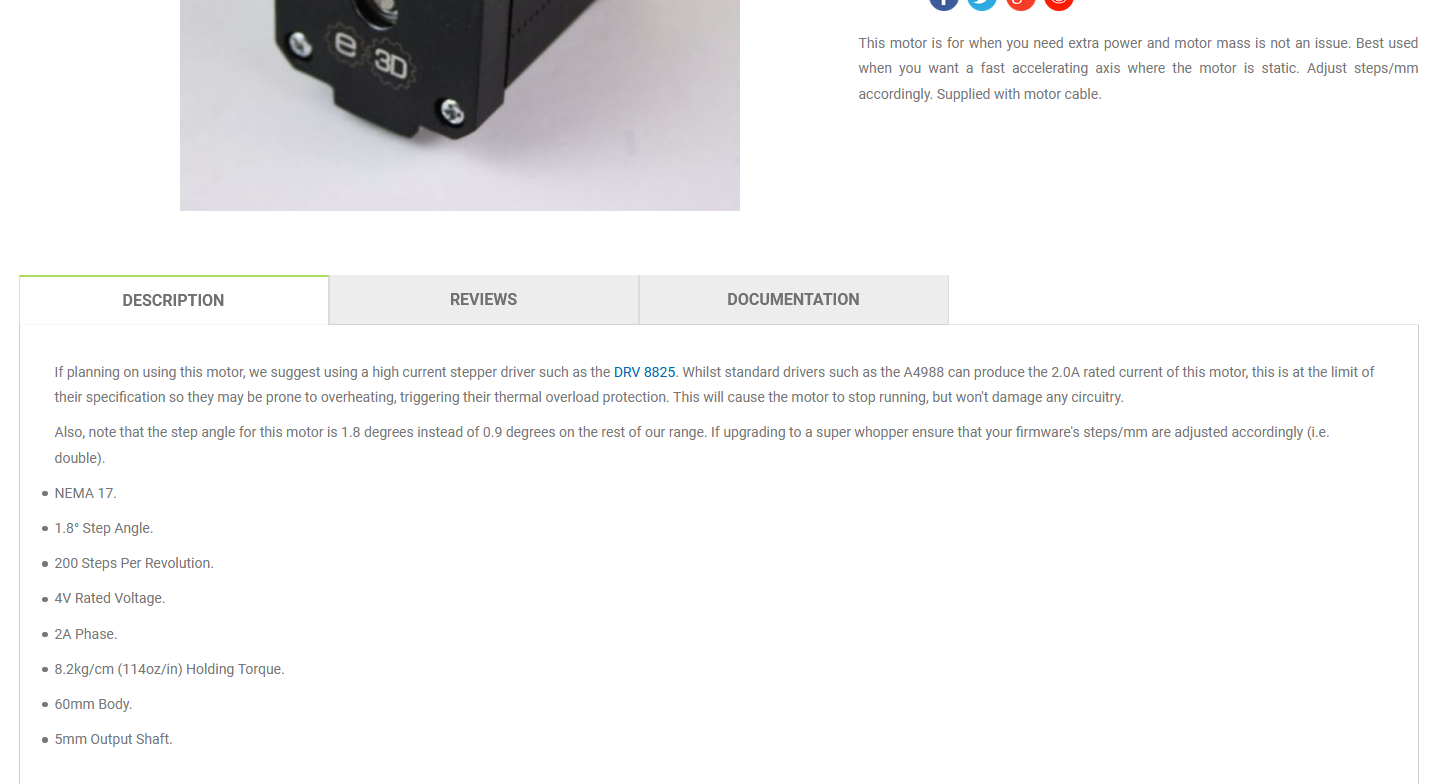
anch'io, volendo upgradare la mia macchina mi son imbattuto nella felice scelta tra i driver ed ho raccolto un po' di informazioni. la mia conclusione è che per i motori che utilizza la anycubic, in genere, il tmc2208 è il driver più sbagliato che si possa abbinare. il motivo è semplicemente legato ai suoi dati di targa e a come un motore passo-passo funziona. nei datasheet dei tmc2208 è riportata questa voce: "Motor Phase Current max 1.2A RMS, 2.0A Peak" tra le note, più in basso, dove spiega come settare la vref, c'é anche scritto che : "The best way to set the motor current is by measuring the voltage on the Vref pin (0…2.5V) and adjusting the voltage with the potentiometer. The maximum settable motor current is 1.77A RMS (0.11Ohm sense resistors), but the SilentStepSticks can only be used up to 1.2A RMS." occhio alle parti in grassetto. ed i motori anycubic hanno valore di "rated courrent" 1,5Arms alcuni "guru", anche sui propri canali youtube e/o telegram, affermano che va tutto bene e che, addirittura, fornire minor corrente ai motori li preservi, anzi li faccia sforzar meno. è evidente che per questi l'elettrotecnica sta su un pianeta molto lontano. i motori passo-passo vengono alimentati in fase di spunto, accelerazione, proprio dalla corrente di picco fornita dal driver ma poi, per garantire il loro valore di coppia massima (coppia di tenuta), richiedono al driver, in maniera costante la corrente rms. sembrerà strano ma il momento in cui un motore passo passo eroga il massimo della sua forza (coppia) è proprio quando è fermo...ma alimentato. in quella fase "spreme" letteralmente il driver ai limiti delle sue capacità nell'erogare la corrente efficace che gli serve per raggiungere il suo valore max di coppia statica. altro fattore importante è comprendere che, nel funzionamento dei motori pp, la coppia diminuisce al crescere della velocità. è inutile complicare ulteriormente il discorso, dicendo che quando ai driver viene richiesto di lavorare in microstepping, come esattamente avviene nel caso della stampa 3d, ci sono ulteriori limitazioni, o meglio, cali di corrente erogabile. guardate i dati del 2208...2A di picco che diventano 1,2 in rms quando dovrebbero essere poco più di 1,4 (Irms -> RMS (Root Mean Square) current per phase (Irms = Imax / 1.41)) . a questo punto basta leggere le indicazioni che la e3d suggerisce per poter utilizzare i propri motori ad alta coppia...ad alta corrente: "If planning on using this motor, we suggest using a high current stepper driver such as the DRV 8825. Whilst standard drivers such as the A4988 can produce the 2.0A rated current of this motor, this is at the limit of their specification so they may be prone to overheating, triggering their thermal overload protection. This will cause the motor to stop running, but won't damage any circuitry." ps: nel motore e3d il valore della "rated courrent" è di 2 Ampere ma il discorso è contestualizzabile all'accoppiata motori anycubic (1,5 Arms e driver 2208 1,2Arms)

-
vi sembra interessante questa clone?
monux ha risposto a Killrob nella discussione Notizie sulla stampa 3D
chiarissimo, grazie mille...sei stato molto utile. dato che con raspberry siamo amici sin dalla sua prima versione, ed in casa ne ho alcuni 3b+ a dormire, vuol dire che proverò ad impiegarlo per vedere cosa ne vien fuori. certo però, che 100 mm/s reali, per la mia anycubic i3 mega s mi sembrano un po' tantini. credo che prima sarà necessario qualche upgrade importante. -
vi sembra interessante questa clone?
monux ha risposto a Killrob nella discussione Notizie sulla stampa 3D
a dire il vero sono ancora in fase, molto iniziale, di studio (sempre per curiosità) ma....perchè non avrebbe senso? -
vi sembra interessante questa clone?
monux ha risposto a Killrob nella discussione Notizie sulla stampa 3D
l'ho adocchiata anch'io...ci sono arrivato approfondendo l'argomento klipper 😉 se può essere utile, lascio dei link utili per la configurazione, si tratta di un bell'articolo/guida in italiano e del link corretto al configuratore di firmware reprap. https://www.3dfastprint.it/home/assistenza/configurazione-duet-wifi/ https://configtool.reprapfirmware.org/Start -
Anycubic mega X schemi e dettagli tecnici
monux ha risposto a Alessandro72 nella discussione Anycubic
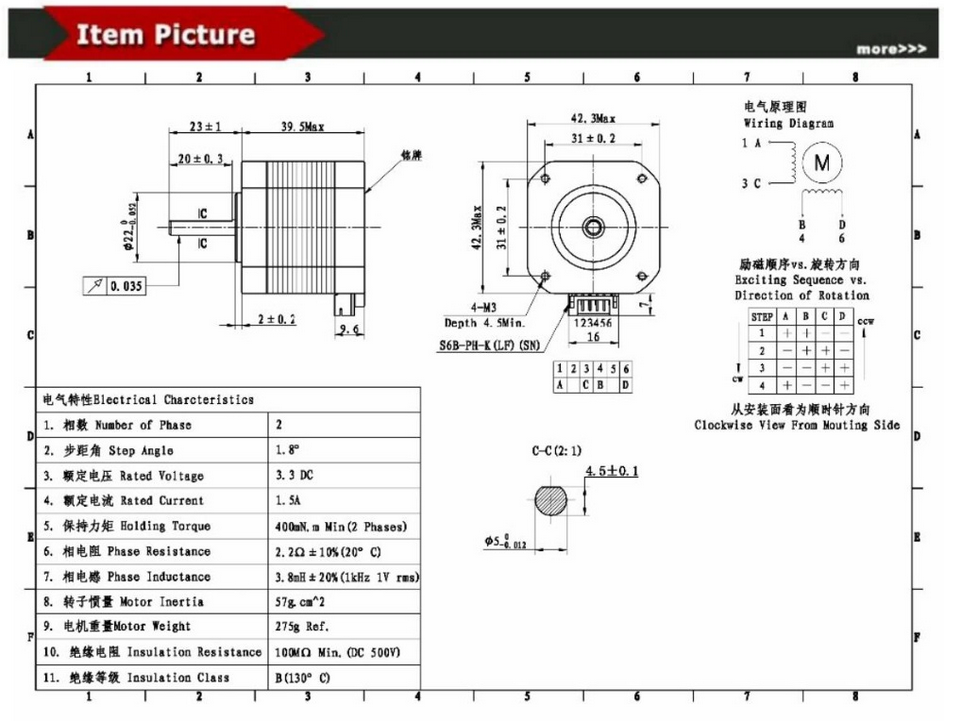
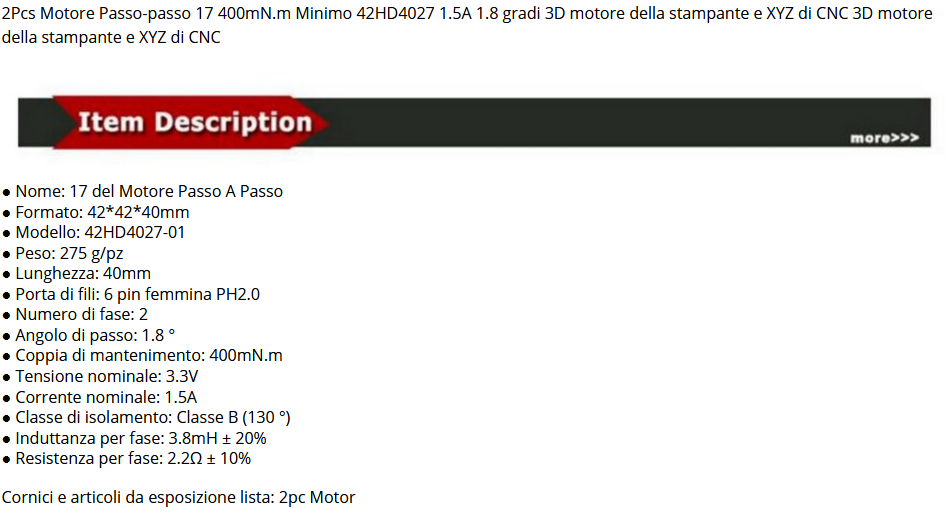
queste sono le caratteristiche reperite in rete con la sigla dei motori per i vari assi
-
INFORMAZIONI SU ANICUBIC I3 MEGA S
monux ha risposto a EMOZIONE nella discussione Hardware e componenti
dipende dagli step-drivers. con gli 8825 si -
ti do ragione, questo è il mio: https://www.amazon.it/gp/product/B073CK1WR9/ref=ppx_yo_dt_b_search_asin_title?ie=UTF8&psc=1 ne ho anche altri cnesi ma questo è fatto vermente bene. non hai bisogno di rifare lo zero ad ogni misurazione. ha l'autospegnimento e si riaccende non appeni sposti la parte mobile. per quel che costa da delle buone misurazioni ripetibili.
-
Anycubic I3 Mega Stepper driver upgrade
monux ha risposto a DarioI nella discussione Hardware e componenti
ciao Dario....neanch'io so rispondere al tuo quesito sul rumore ma mi sento di darti un consiglio sugli "stepper" da acquistare. considera che il "guru" per le modifiche sulla nostra stampante è david ramiro, colui che lavora anche sui firmware e se vai a leggere tra le note dell'ultimo rilasciato noterai che viene indicato il totale supporto a due modelli, i costosi watterott, ed i più accessibili fystech. c'é scritto: Support Watterott or FYSETC TMC2208 without having to reverse the connectors Other vendors' TMC2208 might work well too but I strongly recommend those qui trovi il riferimento al firmware: https://www.thingiverse.com/thing:3249319 ps: il firmware non è strettamente necessario, ma dovrai invertire il connettore di ogni motore e qui i modelli fystech: https://www.ebay.it/itm/372640134125 https://www.ebay.it/itm/372935118763 ciauuu -
INFORMAZIONI SU ANICUBIC I3 MEGA S
monux ha risposto a EMOZIONE nella discussione Hardware e componenti
io ho la tua stessa stampante....da novembre, ma sono uno che si "accanisce" sulle cose. prima di pensare agli upgrade, ti consiglierei di maturare un po' di esperienza sulla macchina e di metterci mani! nel senso che, essendo comunque una macchina di livello economico (uso domestico), arriva assemblata (semi-assemblata in realtà) in maniera mediocre. da una bella controllata al tutto e dove possibile utilizza un po' di frena filetti a tenuta bassa. impara a conoscerla con i vari materiali che si possono stampare senza troppe rogne per una macchiana aperta, perciò pla; petg; tpu. per gli upgrade c'è sempre tempo ma secondo un mio ordine: 0) upgrade firmware o, se preferisci, passaggio al marlin scritto ad hoc per questa macchina, con conseguente (in entrambi i casi) calibrazione di tutti gli step/mm con cui lavora questa macchinetta. devo dire che in configurazione standard rende già abbastanza bene ma non è tarata al millesimo, perciò una bella "registrata" ci vuole....sarà gratis e ti darà subito netti miglioramenti. 1) buon nozzle (microswiss o e3d) + molle rigide per il piatto 2) buon diffussore d'aria per il pezzo stampato (stampalo in petg) 3) tubo in teflon di quaità per il bowden (capricorn o clone cinese tringlelab) 4) ventola silenziosa e più grande sulla scheda madre (quella di serie oltre ad essere rumorosa non soffia nemmeno su tutti gli step-driver e pochissimo sui mosfet on-board) 5) stesso discorso per l'alimentatore 6) mosfet per bed e hot-end 7) cavi in silicone per il bed ....poi tutto il resto che possono essere il cambio degli step-driver (quelli di serie hanno l'unico difetto di esser rumorosi); alimentatore con un mean well; tl-smoother ecc. un discoroso a parte, secondo me, va fatto per l'hotend perchè quello di serie, che è un V5, è un clone valido e se devi cambiarlo è ovvio che devi passare ad un v6, soprattutto se preferisci stampare materiali che richiedono temperature nell'intorno dei 235° e oltre. i cloni v6 buoni son pochi, trinaglelab ne fa uno buono ma, per mettere il v6 dovrai rivedere un po' di cosette e, a questo punto, ti servirà conoscere benino la tua macchina. -
Help indicazioni PC per modellazione
monux ha risposto a sic3196 nella discussione Problemi di modellazione 3D, gestione mesh, esportazione in stl
quale versione di rhino? considera che tra la 6 e la 5 c'è una bella differenza di richieste hardware ma...in realtà, almeno per ora, la 5 è quella che meglio si presta a fare i lavori più disparati perchè a differenza della 6 riesci ad utilizzare regolarmente tutti plugin, sia free che a pagamento, che trovi su http://www.food4rhino.com/ un'esempio di plugin utilissimi son quelli per la generazione di ingranaggi partendo dalle caratteristiche che ti servono, tipo il passo, l'angolo di pressione ecc. https://slideplayer.it/slide/3747459/12/images/33/TRASMISSIONI+A+INGRANAGGI%3A+parametri+della+ruota+dent..jpg un suggerimento per i corsi. cerca su youtube filippo sicuranza e fabrizio cimò, sono due persone che hanno pubblicato video veramente utili sul mondo rhino. ps: entrambi "insegnano" con rhino5. -
Troppo stringing con FlashForge Finder
monux ha risposto a Luke85 nella discussione Problemi generici o di qualità di stampa
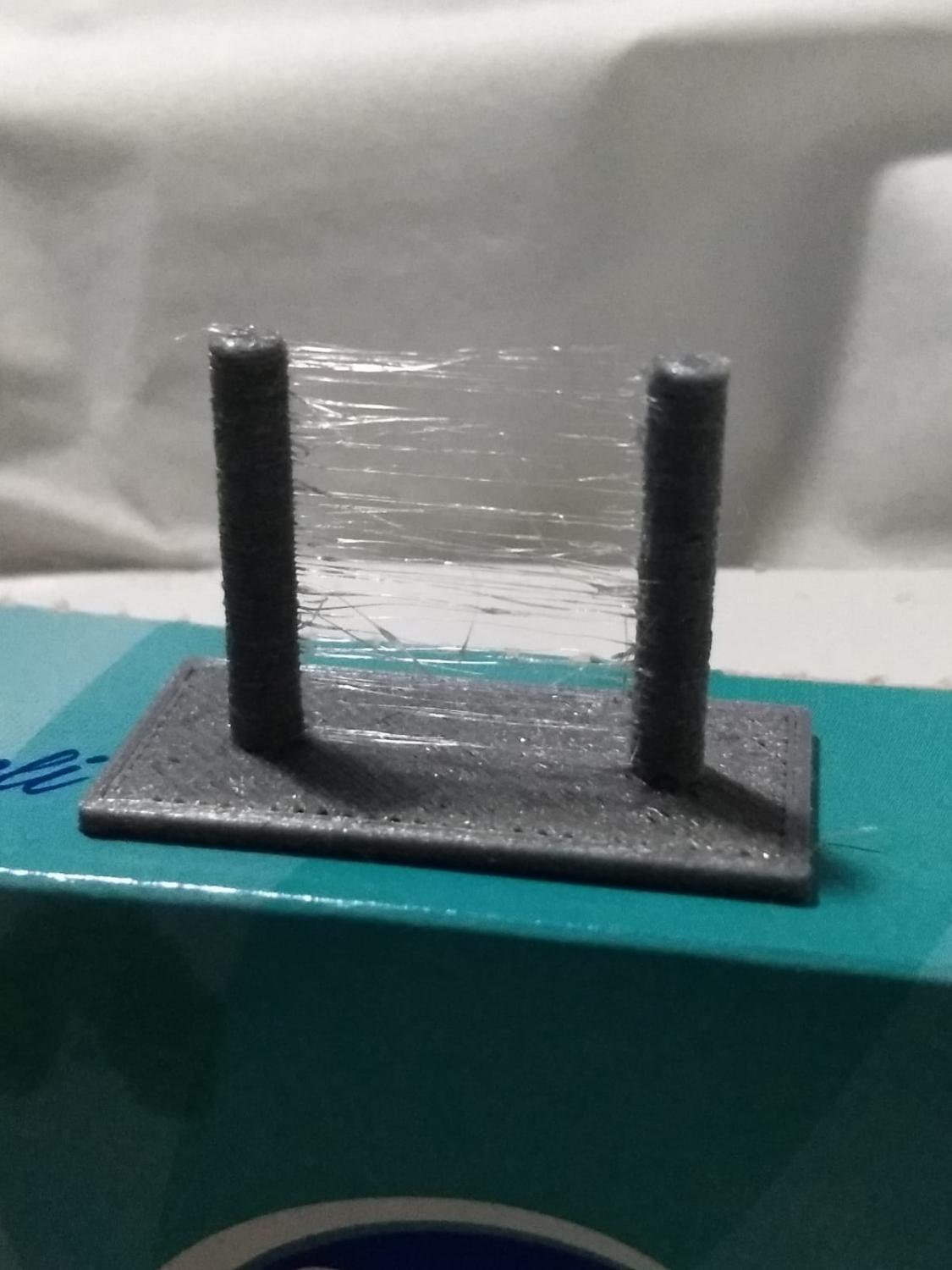
anche se son novello come te, ho la stampante dai primi di novembre, provo a darti qualche suggerimoento. innanzitutto guardati dei video ben fatti sulla calibrazione. io ho trovato ottimi quelli di piraz: https://www.youtube.com/channel/UCB0gDrlGzmzReadgtubiNrQ/playlists dopo di che ti stampi una temp_tower, tipo quelle che ti linko: https://www.thingiverse.com/thing:2729076 https://www.thingiverse.com/thing:2092820 dopo aver individuato almeno grossolanamente le temperature migliori, dal primo link delle temp tower ti scarichi i moduli singoli ed inizi a variare qualche parametro come hai gia fatto...ma il consiglio che ti do è di fare delle variazioni anche importanti. non aver paura di osare (sempre con logica ovviamente). a questo punto fai anche la stampa di qualche semplice test per lo stringing: https://www.thingiverse.com/thing:2080224 considera che potrebbe capitarti di dover stampare una bobina a temperatura anche più bassa di quella suggerita dal produttore. purtroppo dipende da tanti fattori. per dirti, e rinquorarti, in questi giorni il petg è diventata la mia bestia nera. quando avevo perso le speranze ho dato una bella botta a retraction ed ora il tutto è diventatao accettabile. non ottima...ma continuerò a lavorarci. ps: assicurati che dopo tutte le prove fatte l'ugello, innanzitutto almeno esternamente, sia pulito. ti posto il momento in cui mi h capito un po' di cose:
-
Stampante fdm in ambienti freddi e umidi
monux ha risposto a Gabr222 nella discussione La mia prima stampante 3D
la butto la...e se, rinunciando a qualche cm nelle dmensioni di stampa, acquistassi una stampante chiusa? la sharebot one ad esempio 😉
-
fantasmino...non proprio ino.
monux ha risposto a monux nella discussione Le tue stampe - Album fotografico dei migliori modelli 3D
grazie. il link è nel primo messaggio, prima delle foto. myminifctory 😉 -
fantasmino...non proprio ino.
monux ha risposto a monux nella discussione Le tue stampe - Album fotografico dei migliori modelli 3D
grazie mille. ho la stampante dai primi di novembre ed i tuoi complimenti mi lusingano e mi fanno capire che evidentemente le ore "buttate" sui tutorial ed articoli vari non sono state sprecate. ho fatto altre stampe, i soliti cubi e cubetti, più o meno articolati per valutare flussi di stampa, velocità e tutto il resto ma in effetti la mia esperienza di stampa si limita all'aver consumato circa 2/3 di bobina per far le prime esperienze. adesso sto affrontando il petg, che a quanto ho capito, dovrebbe essere il materiale che meglio si adatta alle mie necessità. -
fantasmino...non proprio ino.
monux ha pubblicato una discussione in Le tue stampe - Album fotografico dei migliori modelli 3D
salve a tutti. quando si ha stampato poco è facile dire questa è la mia stampa migliore 🤣 bando alle ciance....vi presento il mio fantasmino. si tratta di un file trovato nel periodo appena succesivo ad halloween che però ho stampato 15 giorni dopo aver ricevuto la mia anycubic i3 mega S. la stampa è stata eseguita con layer a 0.2; con velocità (generale) di 45 mm/s; il "coso" è alto circa 7,5 cm e ci son volute circa sette ore. il filamento è un normalissimo pla arrivatomi con la stampante...anycubic. il fantasma faceva parte di un giocattolo per la festa americana ed il disegnatore lo ha messo su una base girevole motorizzata ma io ho stampato solo il "coso" per fare un primo giocattolino per il mio bimbo di 15 mesi....che adesso grida uhuuuuuu quando lo afferra ed inizia a correre per casa. vi lascio il link: https://www.myminifactory.com/object/3d-print-motorized-halloween-ghost-nightlight-30972
-
benvenuto. io ho la tua stessa stampante...acquistata 10 giorni fa. sono di parte ma....ottima scelta. vedrai che con un po' di pazienza e dedizione riuscirai a tirar fuori belle soddisfazioni.

.jpeg.246afb19249e0ed943b9deda362f301b.jpeg)
.jpeg.3f432a6c9c9531ccbb00f801d078183e.jpeg)
