AndyF
-
Numero contenuti
6 -
Iscritto
-
Ultima visita
-
Giorni Vinti
2
Tipo di contenuto
Profili
Articoli
Introduzione alla stampa 3D
Database materiali
Forum
Calendario
Blogs
Gallery
Download
Store
Tutti i contenuti di AndyF
-
Sviluppo e costruzione stampante custom
AndyF ha risposto a AndyF nella discussione Hardware e componenti
Buona sera a tutti. Non ho più aggiornato il progetto perchè ne è stato interrotto lo sviluppo. Mi spiego meglio: ho potuto osservare e fare delle prove sul tensionamento di cinghie e toccare con mano diversi modelli di stampante che prima non avevo neanche preso in considerazione. Sono arrivato a puntare sul modello di coreXY denominato eclips3d. Questo utilizza una meccanica basata su componenti di alluminio e per aree non troppo estese ( fino a circa 400*400mm ) si riesce a ottenere un ottimo posizionamento. Pienamente compatibile con gli estrusori E3D. Sto apportando delle modifiche al progetto per alloggiare l'elettronica in mio possesso. Per mantenere l'animo dell'open souce ma mantenendo i crediti degli sviluppatori originali renderò disponibili solamente i file delle parti modificate e scriverò qualche nota in più sull'assemblaggio (tempo permettendo). Per chi fosse interessato a mantenere la linea del progetto "Ultimaker" segnalo il sito RobotDigg, potete reperire tutte le parti pressofuse risparmiando moltissimo lavoro ed appoggiarvi per il resto ai BOM caricati dagli sviluppatori Ultimaker ( lavoro ottimo ma parecchio laborioso ). Ad oggi ho ordinato tutte le parti tranne i profilati in alluminio e i componenti stampati perchè appunto sto apportando delle modifiche. Prossimamente farò muovere l'elettronica e appena avrò tutto farò un breve report fotografico. Per ora come da modello originale utilizzerò un solo estrusore. Ho deciso di puntare su una macchina desktop e non di produzione per questioni logistiche. Questa mi servirà da base per la costruzione di un modello più avanzato e più grande, sul quale verranno montati i 2 estrusori di cui parli. La ritengo una cosa fondamentale nel momento in cui punti su una fascia non più ludica o hobbystica ma quando devi iniziare a tenere in considerazione le richieste che ti possono arrivare. Per quanto riguarda l'elettronica: non è complesso, fidati. Mi ritengo uno smanettone, non professionista. Il procedimento dettagliato per farla muovere non può essere liquidato in qualche riga ma spero di farti il capire il concetto: - esistono varie elettroniche in commercio tutte con comunity di supporto molto attive. Ho optato per Arduino Mega + Ramps 1.4 perchè è veramente una delle soluzioni più utilizzate e nel caso di problemi è molto semplice individuare guasti ( di Ramps si trovano tutti i disegni e progetti ). Inoltre Arduino è Italiano, supportiamo! A tua discrezione puoi scegliere se avere o meno un display per lavorare con la stampante scollegata dal computer. - in rete puoi reperire tantissimi schemi per connettere la tua scheda elettronica alle parti di cui disponi ( solitamente motori, fine corsa, cartuccia riscaldante, sensori di temperatura, display ). Assemblare tutto è molto più semplice che montare un mobile Ikea :) - la parte più ostica se uno non ha dimestichezza con l'elettronica e qualche nozione di codice può essere la scelta, modifica e caricamento del firmware. Prendendo ad esempio la mia scelta, cercherò dalle varie comunity un firmware ( il codice/programma che va caricato sulla scheda per dire a questa cosa deve fare ) compatibile con Arduino Mega, Ramps 1.4 e che inoltre supporti un display e lettura da scheda SD per lavorare autonomamente. Qualche parola sul motore di ricerca ed arrivi subito al risultato ( nel mio caso ho pescato questa pagina ). Scarichi quello che può fare al caso tuo ( leggi molte recensioni! ) e in base alle caratteristiche della tua macchina modifichi qualche riga di codice ( esempio senso di rotazione dei motori, spostamenti ). Trovi molti tutorial, non aver paura. Carichi il firmware e testi, sei pronto a partire! Andrea -
Sviluppo e costruzione stampante custom
AndyF ha risposto a AndyF nella discussione Hardware e componenti
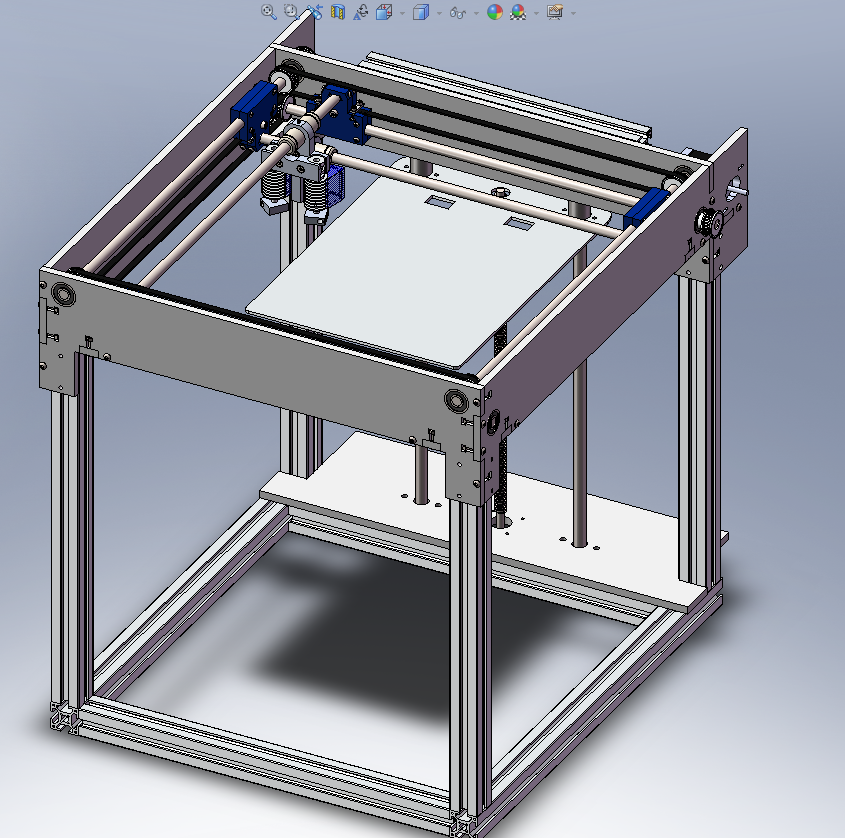
Buonasera, il progetto procede e prende forma velocemente. Ad oggi ho impostato le linee guida per la movimentazione XY tenendo sempre conto delle macchine con cui verranno ricavati i pezzi. L'area utile ( in 50 x 50 cm di chassis) è di 300 x 300 mm (XY) mentre l'altezza in Z devo ancora definirla. Sono state nascoste le parti non necessarie ( rinforzi, box elettronica ) al fine di farmi dare qualche consiglio per come impostare l'asse Z. Le guide sono da 12mm, ho già comprato dei cuscinetti flangiati. La piastra che trovate in foto è puramente indicativa, non verrà adottata una soluzione del genere! Mi costruirò un heat bed da 300 x 300. In particolare sono indeciso tra 2 soluzioni: - piano da 300 x 300 utili netti ( + circa 70mm per le guide) a sbalzo in ergal da 3mm opportunamente alleggerito e ridotto all'indispensabile a cui fissare sospeso e regolabile l'heat bed con sopra il vetro removibile. Il braccio potrebbe diventare eccessivo? - posizionare 4 guide agli angoli ed allargare l'intera piastra aggiungendo 2 cuscinetti lineari. In questo caso è necessario disporre di più di 1 vite per il sollevamento? Grazie per i consigli, Andrea
-
Sviluppo e costruzione stampante custom
AndyF ha risposto a AndyF nella discussione Hardware e componenti
Ciao FoNzY, ad oggi il progetto a cui sto lavorando prevede un area utile di circa 220 x 220 x 250 Se si andasse a parare su una meccanica più "classica" (es trasmissione Makerbot replicator) credo sarebbe più semplice espandere l'area di lavoro, ma basandomi sulla trasmissione cartesiana il massimo che posso fare sarà allungare la corsa in Z. Inoltre ho dei vincoli imposti dalle macchine con cui verranno realizzati i pezzi che non possono superare i 500 x 350. Nelle prossime settimane caricherò alcune immagini per far capire meglio a che punto sono con la progettazione -
Sviluppo e costruzione stampante custom
AndyF ha risposto a AndyF nella discussione Hardware e componenti
Intanto grazie per la risposta! Se puoi spiegami pure cosa ti lascia perplesso... a me sembra che l'inerzia delle parti in movimento sia ben minore e quindi lo spostamento sia più fluente. Per l'hotend ci hai preso, ne ho comprato uno cinese per fare delle prove ma quando dovrò effettivamente usare la stampante non avrò problemi a comprarne uno di originale. Ok grazie! Allora intanto devo decidere bene sulla parte meccanica così da fare l'aggiunta del convogliatore una volta ultimato l'estrusore. -
Sviluppo e costruzione stampante custom
AndyF ha pubblicato una discussione in Hardware e componenti
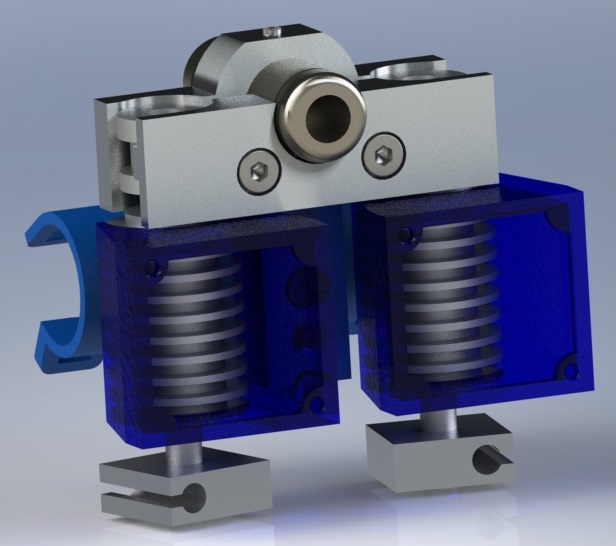
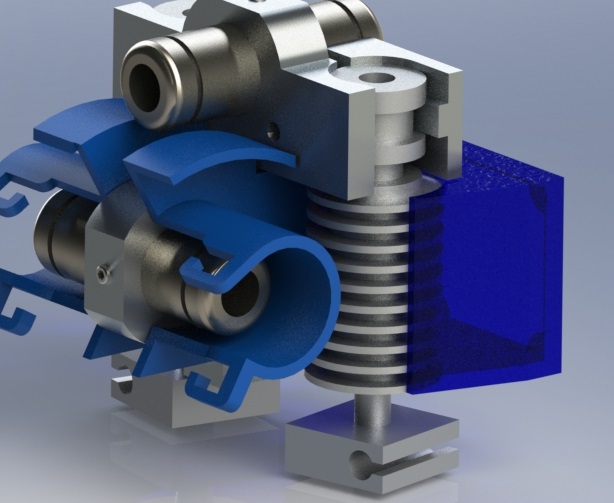
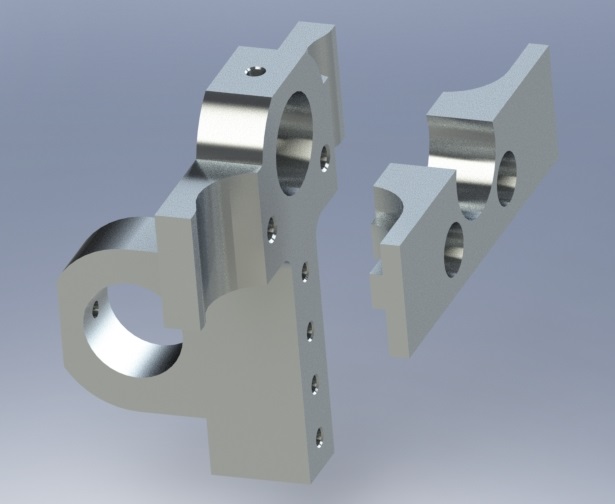
Ciao a tutti!Apro questo topic per condividere con voi il progetto e la costruzione della mia stampante 3D Intanto vi espongo le mie esigenze:- stampare PLA, ABS e materiale idrosolubile- mi servirà per prototipazione o piccoli lotti- ricambistica facilmente reperibile ( sopratutto nel tempo!)- non ho limiti di tempo progettuali ed economici, farò tutto compatibilmente con lo studio e altri lavoriE' da mesi che leggo topic e articoli e ho deciso alcune linee guida del mio progetto:- utlizzo prevalente di alluminio, soprattutto nelle parti meccaniche!- elettronica classica con arduino + ramps 1.4 + ecc ( la solita roba cinese rimarchiata vista e rivista) già ordinata- telaio in stile "Mankati" o "Ultimaker"- doppio estrusore, assolutamente- architettura bowdenLa parte elettronica non mi preoccupa, la ho già ordinata così a tempo perso testerò i vari firmware per ramps.Ora viene in bello, inizierei con le domande MECCANICA Vedo moltissime macchine più "standard", 3 assi con movimentazione lineare e stop. Mi sembra molto interessante la soluzione proposta dalle aziende sopracitate per diversi motivi: - il piano di stampa si muove solo lungo Z, con un pò di ingegno si può costruire un chiocciola a gioco zero e, una volta livellato, il piano dovrebbe essere in qualche modo a manutenzione zero- le guide mobili, che per semplicità chiamerò cartesiane poichè definiscono la coordinata dell'estrusore, sono spostate da 2 cinghie (1 per ogni lato) con conseguente riduzione del gioco compressivo dell'assePer chi ha provato entrambi i sistemi, avete osservazioni e consigli?ESTRUSIONELa macchina sarà boxata e dotata di hotbed quindi la temperatura interna rimarrà stabile. Tutto il carrello sarà realizzato in alluminioAvendo solo visto utilizzare queste stampanti ( anche se solo prusa ) non ho particolari esperienze nella parte dell'estrusore. Utilizzerò del filamento da 1.75 mm.Mi piace molto il metodo utilizzato da Mankati nella xt plus a cui mi sono ispirato. Ripropongo lo stesso sistema nel mio progetto: svitando appena 1 vite si riuscirà a estrarre e sostituire tutto il blocco del dissipatore. Da quello ho capito il modello del j-head è circa standard come parte di fissaggio quindi ho inserito una doppia scanalatura sul morsetto anteriore per allineare gli estrusori. Ne ho già ordinato uno come quelli in figura e lo sto aspettando, qualcuno lo utilizza con successo? Ci sono dei pro e dei contro su questo modello? E' di facile taratura e assemblaggio? Affidabilità nel tempo?Il tutto si muove su cuscinetto da 8mm LM8-LUU di lunghezza 45mm. Nella parte posteriore trova spazio un canalizzatore che porterà l'aria calda lontano dai cuscinetti lineari. Vedo molte macchine montare un ulteriore raffreddamento per la sezione che circonda l'hot end. E' necessaria? Se la inserissi, questa deve puntare l'aria "esternamente" rispetto all'ugello giusto?
-
Buonasera, mi presento: sono Andrea Fantin, ho 20 anni e studio presso l'Università di Trieste :) Mi piace l'elettronica e la meccanica e collaboro con diverse persone per realizzare o fornire piccoli progetti. Potete trovare del materiale online su http://www.andreafantin.it , ancora poco ma verrà aggiunto nei prossimi mesi altro (tempo di stendere le relazioni). Mi sto avvicinando al mondo della stampa 3D, in particolare mi sto progettando una stampante da me. A presto